Loading...
Searching...
No Matches
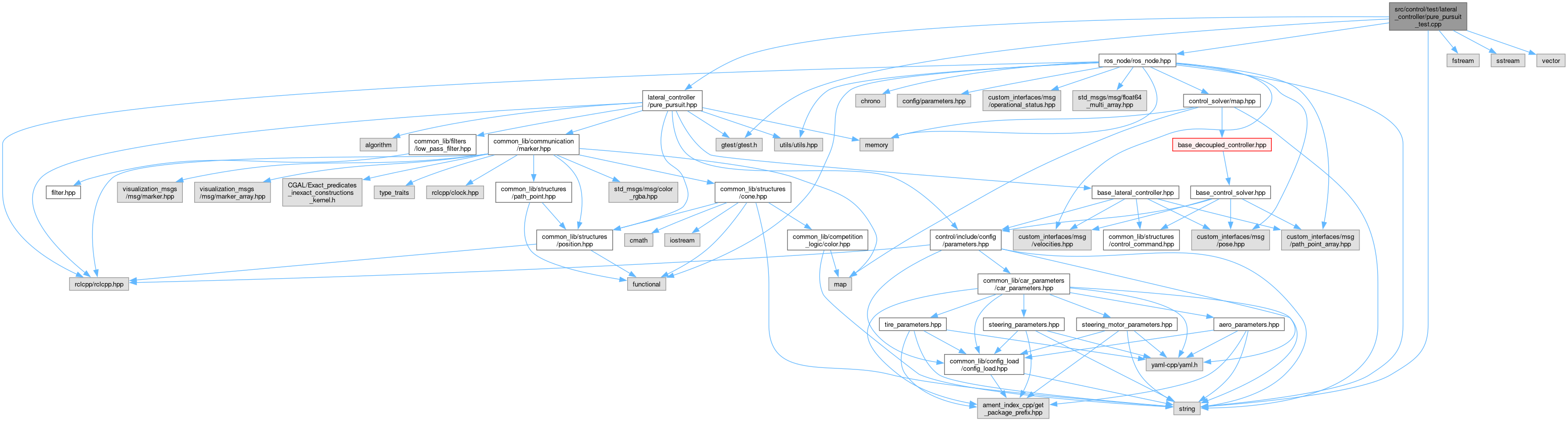
#include "lateral_controller/pure_pursuit.hpp"#include <gtest/gtest.h>#include <fstream>#include <sstream>#include <string>#include <vector>#include "ros_node/ros_node.hpp"
Include dependency graph for pure_pursuit_test.cpp:
Go to the source code of this file.
Classes | |
| class | PurePursuitTestFixture |
Functions | |
| TEST_F (PurePursuitTestFixture, Test_calculate_alpha_1) | |
| Test PurePursuit - calculate_alpha() typical angle - path point left. | |
| TEST_F (PurePursuitTestFixture, Test_calculate_alpha_2) | |
| Test PurePursuit - calculate_alpha() typical angle - path point right. | |
| TEST_F (PurePursuitTestFixture, Test_calculate_alpha_3) | |
| Test PurePursuit - calculate_alpha() 90 degrees angle. | |
| TEST_F (PurePursuitTestFixture, Test_calculate_alpha_4) | |
| Test PurePursuit - calculate_alpha() 0 degrees angle. | |
| TEST_F (PurePursuitTestFixture, Test_calculate_alpha_5) | |
| Test PurePursuit - calculate_alpha() 180 degrees angle. | |
| TEST_F (PurePursuitTestFixture, Test_pp_steering_control_law_1) | |
| Test PurePursuit - pp_steering_control_law() | |
Function Documentation
◆ TEST_F() [1/6]
| TEST_F | ( | PurePursuitTestFixture | , |
| Test_calculate_alpha_1 | |||
| ) |
Test PurePursuit - calculate_alpha() typical angle - path point left.
Definition at line 31 of file pure_pursuit_test.cpp.
◆ TEST_F() [2/6]
| TEST_F | ( | PurePursuitTestFixture | , |
| Test_calculate_alpha_2 | |||
| ) |
Test PurePursuit - calculate_alpha() typical angle - path point right.
Definition at line 46 of file pure_pursuit_test.cpp.
◆ TEST_F() [3/6]
| TEST_F | ( | PurePursuitTestFixture | , |
| Test_calculate_alpha_3 | |||
| ) |
Test PurePursuit - calculate_alpha() 90 degrees angle.
Definition at line 62 of file pure_pursuit_test.cpp.
◆ TEST_F() [4/6]
| TEST_F | ( | PurePursuitTestFixture | , |
| Test_calculate_alpha_4 | |||
| ) |
Test PurePursuit - calculate_alpha() 0 degrees angle.
Definition at line 78 of file pure_pursuit_test.cpp.
◆ TEST_F() [5/6]
| TEST_F | ( | PurePursuitTestFixture | , |
| Test_calculate_alpha_5 | |||
| ) |
Test PurePursuit - calculate_alpha() 180 degrees angle.
Definition at line 94 of file pure_pursuit_test.cpp.
◆ TEST_F() [6/6]
| TEST_F | ( | PurePursuitTestFixture | , |
| Test_pp_steering_control_law_1 | |||
| ) |
Test PurePursuit - pp_steering_control_law()
Definition at line 109 of file pure_pursuit_test.cpp.