Loading...
Searching...
No Matches
MockLandmarkFilter Class Reference
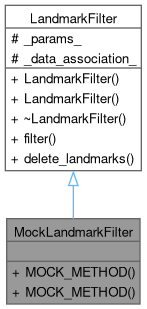
Inheritance diagram for MockLandmarkFilter:
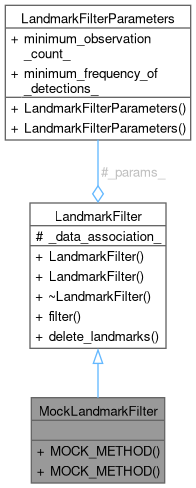
Collaboration diagram for MockLandmarkFilter:
Public Member Functions | |
| MOCK_METHOD (Eigen::VectorXd, filter,(const Eigen::VectorXd &observations, const Eigen::VectorXd &observation_confidences, Eigen::VectorXi &associations),(override)) | |
| MOCK_METHOD (void, delete_landmarks,(const Eigen::VectorXd &some_landmarks),(override)) | |
 Public Member Functions inherited from LandmarkFilter Public Member Functions inherited from LandmarkFilter | |
| LandmarkFilter ()=default | |
| LandmarkFilter (LandmarkFilterParameters params, std::shared_ptr< DataAssociationModel > data_association) | |
| virtual | ~LandmarkFilter ()=default |
| virtual Eigen::VectorXd | filter (const Eigen::VectorXd &observations, const Eigen::VectorXd &observation_confidences, Eigen::VectorXi &associations)=0 |
| This function receives a new set of observations and returns a filtered set of landmarks in global coordinates that are ready to be added to be added to the map. | |
| virtual void | delete_landmarks (const Eigen::VectorXd &some_landmarks)=0 |
| Used by SLAM to signal to the filter that the landmarks are already in SLAM's map, and they should no longer be returned by the filter as new. | |
Additional Inherited Members | |
| Protected Attributes inherited from LandmarkFilter | |
| LandmarkFilterParameters | _params_ |
| std::shared_ptr< DataAssociationModel > | _data_association_ |
Detailed Description
Definition at line 15 of file graph_slam_solver_test.cpp.
Member Function Documentation
◆ MOCK_METHOD() [1/2]
| MockLandmarkFilter::MOCK_METHOD | ( | Eigen::VectorXd | , |
| filter | , | ||
| (const Eigen::VectorXd &observations, const Eigen::VectorXd &observation_confidences, Eigen::VectorXi &associations) | , | ||
| (override) | |||
| ) |
◆ MOCK_METHOD() [2/2]
| MockLandmarkFilter::MOCK_METHOD | ( | void | , |
| delete_landmarks | , | ||
| (const Eigen::VectorXd &some_landmarks) | , | ||
| (override) | |||
| ) |
The documentation for this class was generated from the following file:
- src/slam/test/slam_solver/graph_slam_solver/graph_slam_solver_test.cpp