Loading...
Searching...
No Matches
utils.hpp File Reference
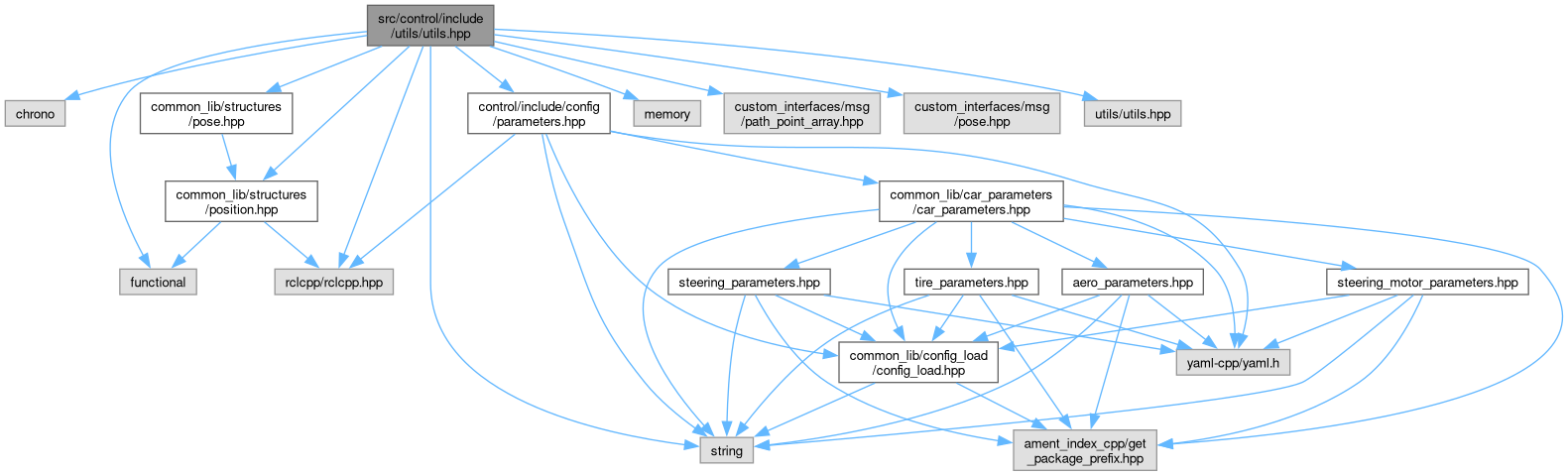
#include <chrono>#include <functional>#include <memory>#include <string>#include "common_lib/structures/pose.hpp"#include "common_lib/structures/position.hpp"#include "control/include/config/parameters.hpp"#include "custom_interfaces/msg/path_point_array.hpp"#include "custom_interfaces/msg/pose.hpp"#include "utils/utils.hpp"#include "rclcpp/rclcpp.hpp"
Include dependency graph for utils.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
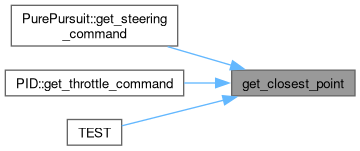
| std::tuple< common_lib::structures::Position, int, double > | get_closest_point (const std::vector< custom_interfaces::msg::PathPoint > &pathpoint_array, const common_lib::structures::Position &position) |
| Find the closest point on the path. | |
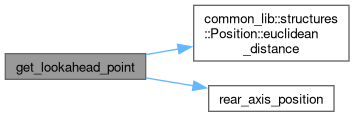
| std::tuple< common_lib::structures::Position, double, bool > | get_lookahead_point (const std::vector< custom_interfaces::msg::PathPoint > &pathpoint_array, int closest_point_id, double lookahead_distance, common_lib::structures::Position rear_axis_position, double last_to_first_max_dist) |
| Update Lookahead point. | |
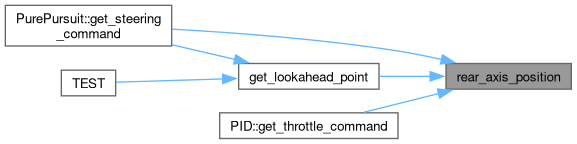
| common_lib::structures::Position | rear_axis_position (const common_lib::structures::Position &cg, double orientation, double dist_cg_2_rear_axis) |
| Calculate rear axis coordinates. | |
Function Documentation
◆ get_closest_point()
| std::tuple< common_lib::structures::Position, int, double > get_closest_point | ( | const std::vector< custom_interfaces::msg::PathPoint > & | pathpoint_array, |
| const common_lib::structures::Position & | position | ||
| ) |

◆ get_lookahead_point()
| std::tuple< common_lib::structures::Position, double, bool > get_lookahead_point | ( | const std::vector< custom_interfaces::msg::PathPoint > & | pathpoint_array, |
| int | closest_point_id, | ||
| double | lookahead_distance, | ||
| common_lib::structures::Position | rear_axis_position, | ||
| double | last_to_first_max_dist | ||
| ) |
◆ rear_axis_position()
| common_lib::structures::Position rear_axis_position | ( | const common_lib::structures::Position & | cg, |
| double | orientation, | ||
| double | dist_cg_2_rear_axis | ||
| ) |
Calculate rear axis coordinates.
- Parameters
-
cg center of gravity position orientation orientation of the vehicle in radians relative to the world frame (ccw) dist_cg_2_rear_axis distance between the center of gravity and the rear axis
- Returns
- Point
Definition at line 5 of file utils.cpp.
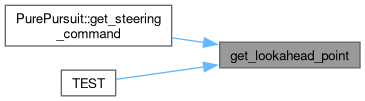
Here is the caller graph for this function: