#include <perceptionSensor.hpp>
Definition at line 11 of file perceptionSensor.hpp.
◆ PerceptionSensor()
| PerceptionSensor::PerceptionSensor |
( |
| ) |
|
◆ addClassProbailities()
| std::vector< Landmark > PerceptionSensor::addClassProbailities |
( |
std::vector< Landmark > & |
in | ) |
|
◆ addNoise()
| std::vector< Landmark > PerceptionSensor::addNoise |
( |
std::vector< Landmark > & |
in | ) |
|
◆ filterFoV()
| std::vector< Landmark > PerceptionSensor::filterFoV |
( |
std::vector< Landmark > & |
in | ) |
|
◆ filterTypeAndDOO()
| std::vector< Landmark > PerceptionSensor::filterTypeAndDOO |
( |
std::vector< Landmark > & |
in | ) |
|
◆ getFrameId()
| std::string PerceptionSensor::getFrameId |
( |
| ) |
|
◆ getName()
| std::string PerceptionSensor::getName |
( |
| ) |
|
◆ handleFalsePositivesAndNegatives()
| std::vector< Landmark > PerceptionSensor::handleFalsePositivesAndNegatives |
( |
std::vector< Landmark > & |
in | ) |
|
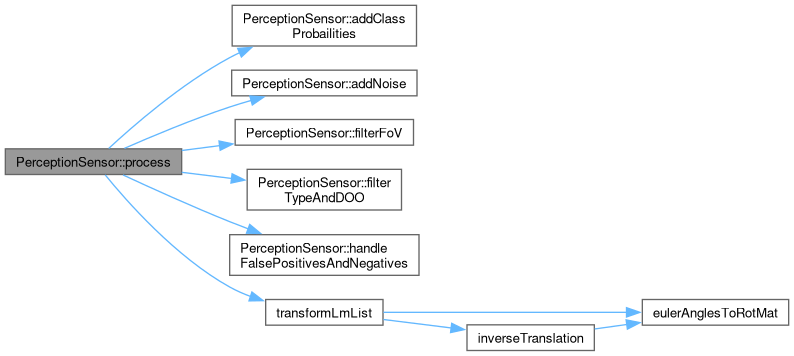
◆ process()
| LandmarkList PerceptionSensor::process |
( |
LandmarkList & |
in, |
|
|
Eigen::Vector3d & |
trans, |
|
|
Eigen::Vector3d & |
rot, |
|
|
double |
time |
|
) |
| |
◆ readConfig()
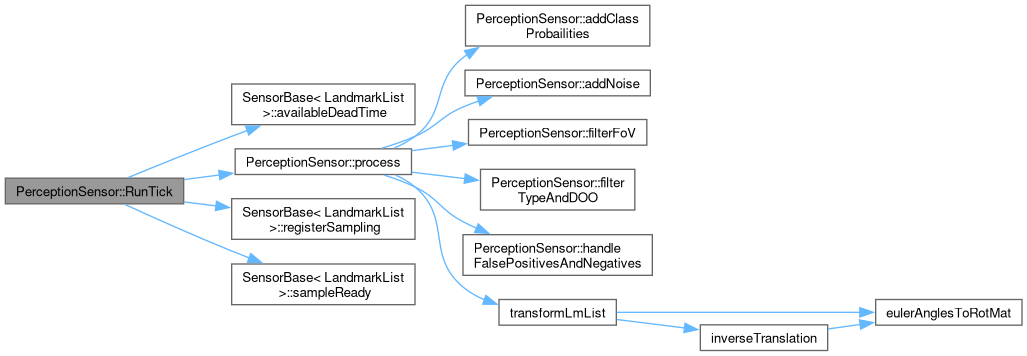
◆ RunTick()
| bool PerceptionSensor::RunTick |
( |
LandmarkList & |
in, |
|
|
Eigen::Vector3d & |
trans, |
|
|
Eigen::Vector3d & |
rot, |
|
|
double |
time |
|
) |
| |
◆ classification_max_distance
| double PerceptionSensor::classification_max_distance |
|
private |
◆ classification_prob_decrease_dist_linear
| double PerceptionSensor::classification_prob_decrease_dist_linear |
|
private |
◆ classification_prob_decrease_dist_quadratic
| double PerceptionSensor::classification_prob_decrease_dist_quadratic |
|
private |
◆ classification_prob_min_dist
| double PerceptionSensor::classification_prob_min_dist |
|
private |
◆ detection_prob_decrease_dist_linear
| double PerceptionSensor::detection_prob_decrease_dist_linear |
|
private |
◆ detection_prob_decrease_dist_quadratic
| double PerceptionSensor::detection_prob_decrease_dist_quadratic |
|
private |
◆ detection_prob_min_dist
| double PerceptionSensor::detection_prob_min_dist |
|
private |
◆ errorMeanAngle
| Eigen::Vector2d PerceptionSensor::errorMeanAngle |
|
private |
◆ errorMeanRange
| double PerceptionSensor::errorMeanRange |
|
private |
◆ errorMeanRangeRelative
| double PerceptionSensor::errorMeanRangeRelative |
|
private |
◆ errorMeanXYZ
| Eigen::Vector3d PerceptionSensor::errorMeanXYZ |
|
private |
◆ errorSigmaAngle
| Eigen::Vector2d PerceptionSensor::errorSigmaAngle |
|
private |
◆ errorSigmaRange
| double PerceptionSensor::errorSigmaRange |
|
private |
◆ errorSigmaRangeRelative
| double PerceptionSensor::errorSigmaRangeRelative |
|
private |
◆ errorSigmaXYZ
| Eigen::Vector3d PerceptionSensor::errorSigmaXYZ |
|
private |
◆ frame_id
| std::string PerceptionSensor::frame_id |
|
private |
◆ maxAngleHorizontal
| double PerceptionSensor::maxAngleHorizontal |
|
private |
◆ maxAngleVertical
| double PerceptionSensor::maxAngleVertical |
|
private |
◆ maxRange
| double PerceptionSensor::maxRange |
|
private |
◆ min_classification_prob
| double PerceptionSensor::min_classification_prob |
|
private |
◆ min_detection_prob
| double PerceptionSensor::min_detection_prob |
|
private |
◆ minAngleHorizontal
| double PerceptionSensor::minAngleHorizontal |
|
private |
◆ minAngleVertical
| double PerceptionSensor::minAngleVertical |
|
private |
◆ minRange
| double PerceptionSensor::minRange |
|
private |
◆ name
| std::string PerceptionSensor::name |
|
private |
The documentation for this class was generated from the following files:
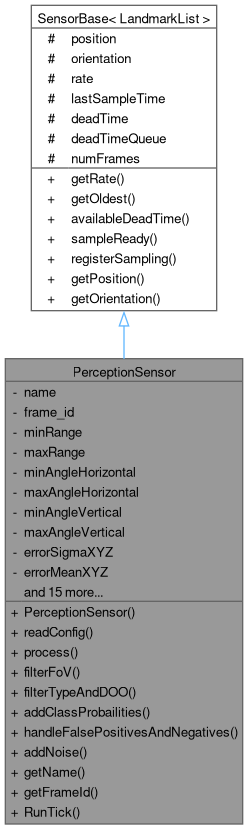

 Public Member Functions inherited from SensorBase< LandmarkList >
Public Member Functions inherited from SensorBase< LandmarkList >