#include <outputCoordinator.hpp>
|
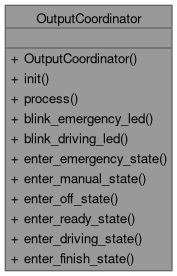
| | OutputCoordinator (SystemData *system_data, Communicator *communicator, DigitalSender *digital_sender) |
| |
| void | init () |
| |
| void | process (uint8_t current_master_state, uint8_t current_checkup_state, uint8_t ebs_state) |
| |
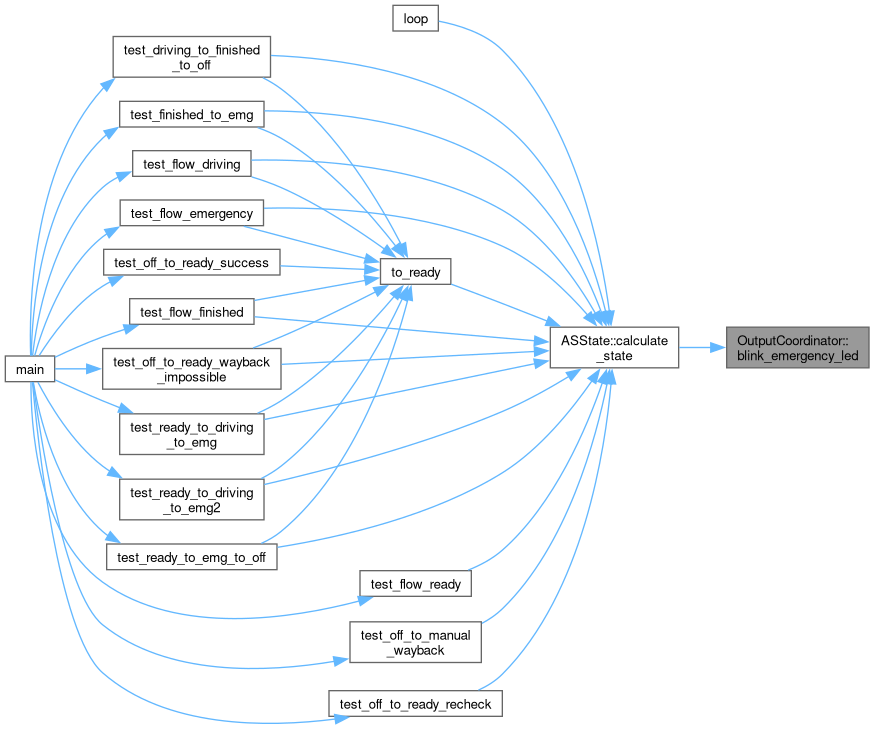
| void | blink_emergency_led () |
| |
| void | blink_driving_led () |
| |
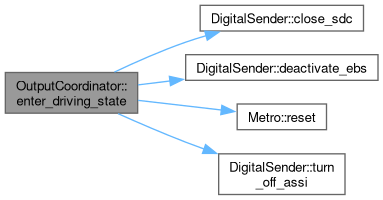
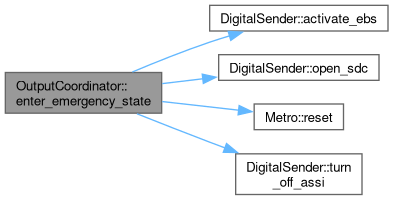
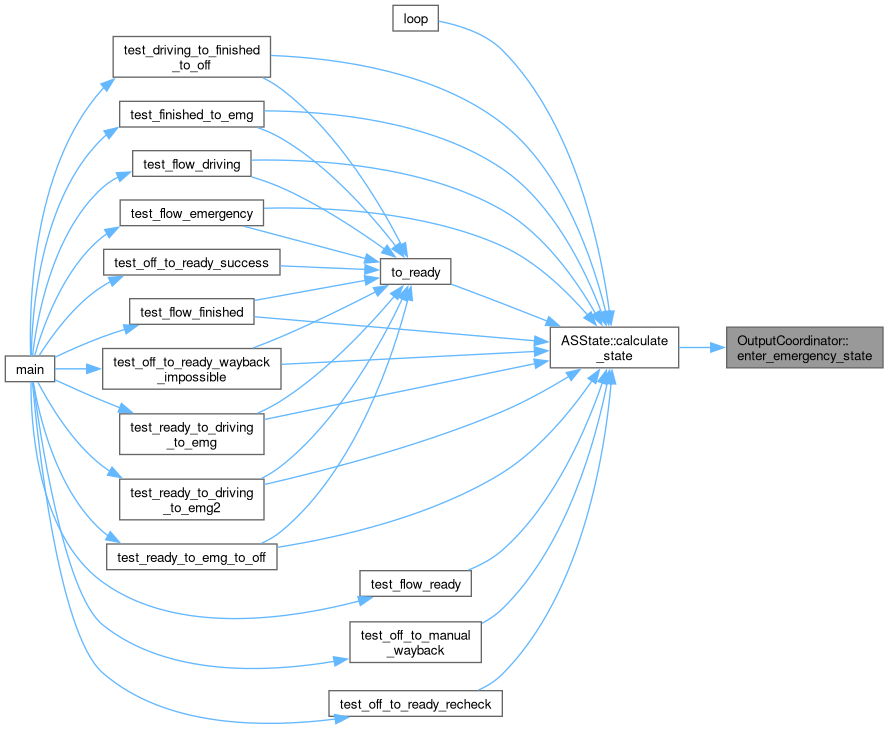
| void | enter_emergency_state () |
| | ASSI LEDs blue flashing, sdc open and buzzer ringing.
|
| |
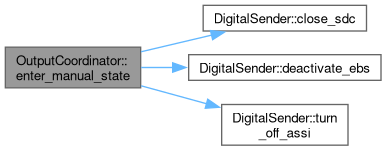
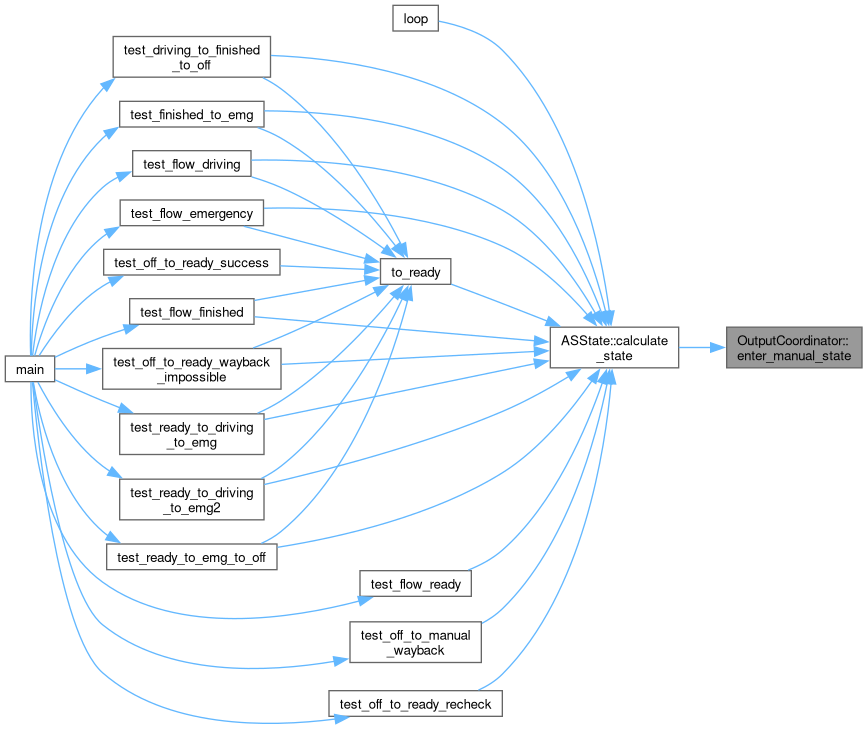
| void | enter_manual_state () |
| | Everything off, sdc closed.
|
| |
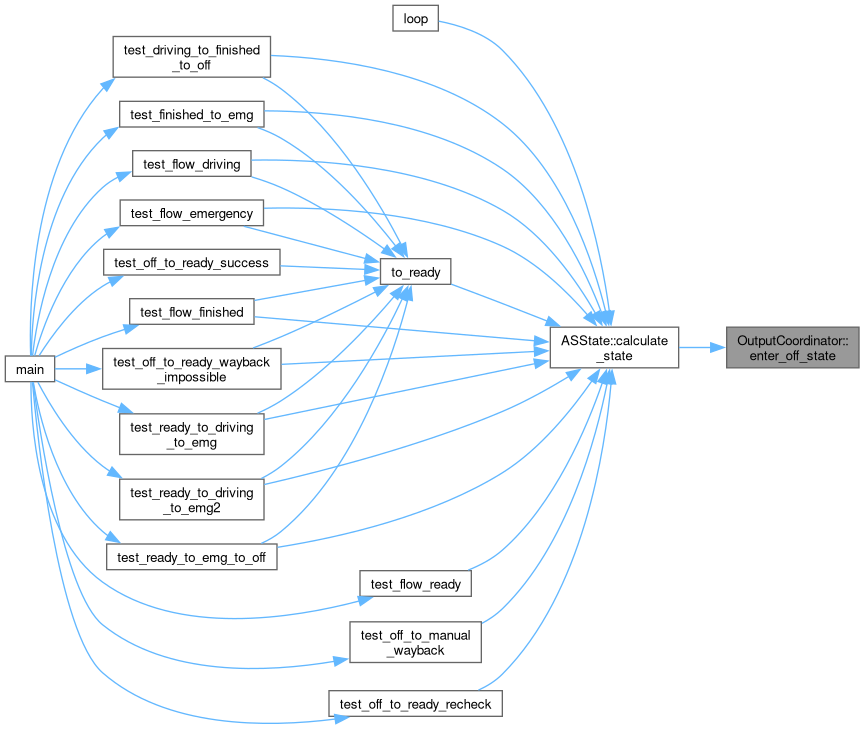
| void | enter_off_state () |
| | Everything off, sdc open.
|
| |
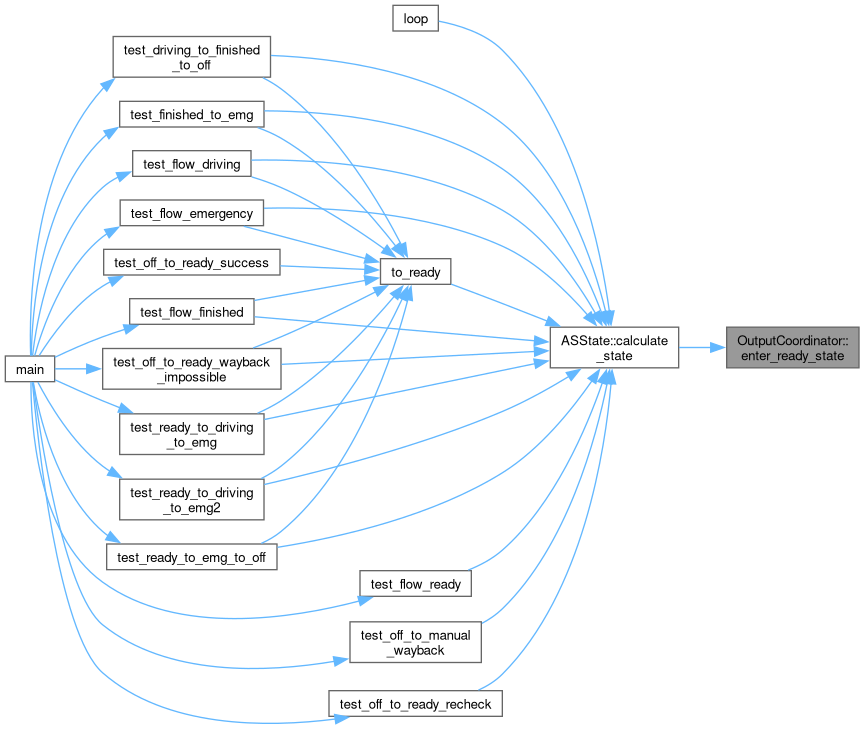
| void | enter_ready_state () |
| | ASSI yellow LED on, ebs valves activated, sdc closed.
|
| |
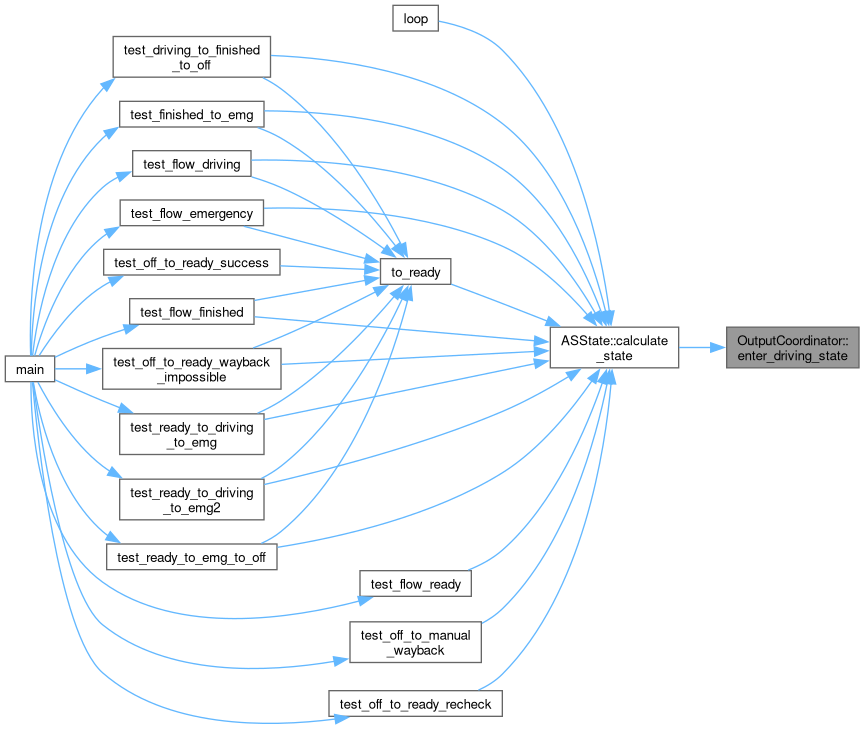
| void | enter_driving_state () |
| | ASSI LEDs yellow flashing, ebs valves deactivated, sdc closed.
|
| |
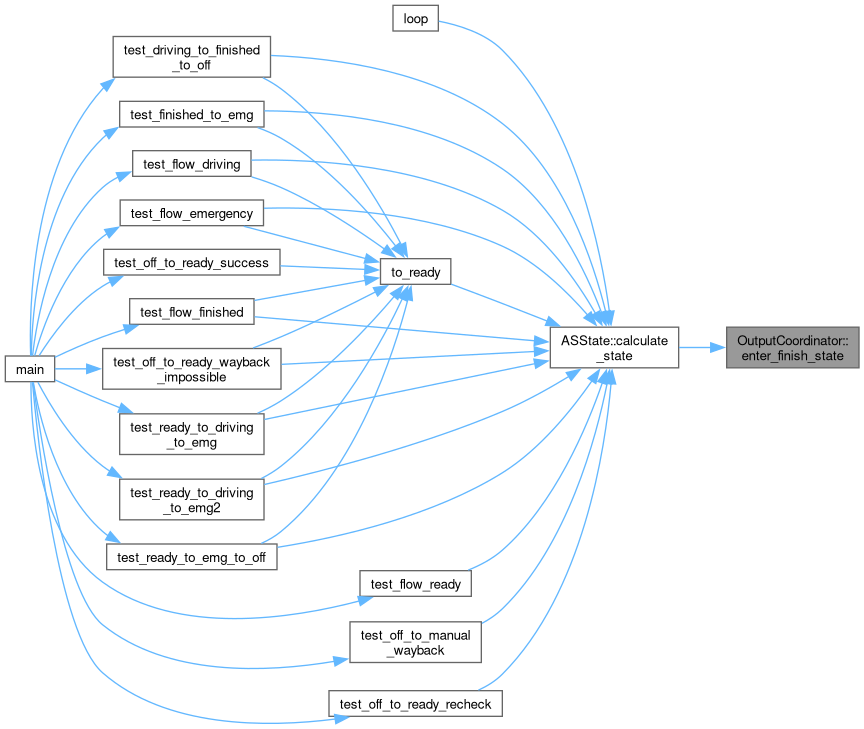
| void | enter_finish_state () |
| | ASSI blue LED on, ebs valves activated, sdc open.
|
| |
| void | refresh_r2d_vars () |
| |
| void | refresh_emergency_vars () |
| |
Definition at line 12 of file outputCoordinator.hpp.
◆ OutputCoordinator()
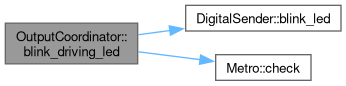
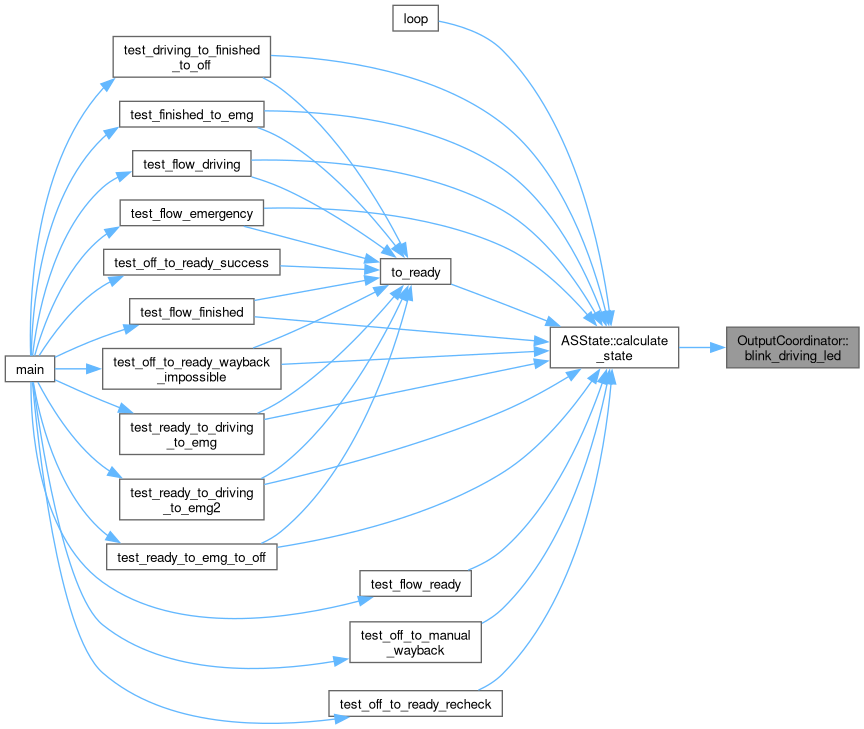
◆ blink_driving_led()
| void OutputCoordinator::blink_driving_led |
( |
| ) |
|
|
inline |
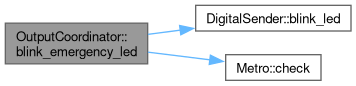
◆ blink_emergency_led()
| void OutputCoordinator::blink_emergency_led |
( |
| ) |
|
|
inline |
◆ enter_driving_state()
| void OutputCoordinator::enter_driving_state |
( |
| ) |
|
|
inline |
◆ enter_emergency_state()
| void OutputCoordinator::enter_emergency_state |
( |
| ) |
|
|
inline |
◆ enter_finish_state()
| void OutputCoordinator::enter_finish_state |
( |
| ) |
|
|
inline |
◆ enter_manual_state()
| void OutputCoordinator::enter_manual_state |
( |
| ) |
|
|
inline |
◆ enter_off_state()
| void OutputCoordinator::enter_off_state |
( |
| ) |
|
|
inline |
◆ enter_ready_state()
| void OutputCoordinator::enter_ready_state |
( |
| ) |
|
|
inline |
◆ init()
| void OutputCoordinator::init |
( |
| ) |
|
|
inline |
◆ process()
| void OutputCoordinator::process |
( |
uint8_t |
current_master_state, |
|
|
uint8_t |
current_checkup_state, |
|
|
uint8_t |
ebs_state |
|
) |
| |
|
inline |
◆ refresh_emergency_vars()
| void OutputCoordinator::refresh_emergency_vars |
( |
| ) |
|
|
inline |
◆ refresh_r2d_vars()
| void OutputCoordinator::refresh_r2d_vars |
( |
| ) |
|
|
inline |
The documentation for this class was generated from the following file: