#include "model/digitalData.hpp"#include "unity.h"#include "embedded/digitalReceiver.hpp"#include "model/systemData.hpp"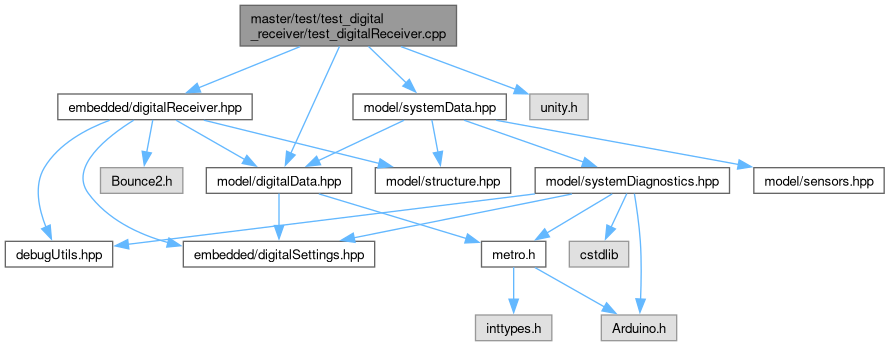
Go to the source code of this file.
Macros | |
| #define | GREEN_LED_1 4 |
| #define | GREEN_LED_2 5 |
| #define | GREEN_LED_3 6 |
| #define | RED_LED_1 0 |
| #define | RED_LED_2 1 |
| #define | YELLOW_LED_1 2 |
| #define | YELLOW_LED_2 3 |
| #define | BUTTON_1 7 |
| #define | BUTTON_2 8 |
| #define | BUTTON_3 9 |
| #define | BUTTON_4 10 |
| #define | BUTTON_5 11 |
| #define | BUTTON_6 12 |
| #define | ASMS_IN_PIN BUTTON_1 |
| #define | SDC_STATE_PIN BUTTON_2 |
| #define | SDC_LOGIC_WATCHDOG_IN_PIN BUTTON_3 |
| #define | SENSOR_PRESSURE_1_PIN BUTTON_4 |
| #define | SENSOR_PRESSURE_2_PIN BUTTON_5 |
| #define | LWSS_PIN BUTTON_6 |
| #define | WHEEL_MEASUREMENT_INTERVAL_MS 1000 |
| #define | WHEEL_MEASUREMENT_INTERVAL_MIN (WHEEL_MEASUREMENT_INTERVAL_MS / 60000.0) |
| #define | PULSES_PER_ROTATION 60 |
Functions | |
| void | setUp () |
| Test the Left Wheel Speed Sensor Check the Left wheel Speed Sensor is being well calculated PROTOCOL: | |
| int | main () |
Variables | |
| SystemData | system_data |
| auto | digitalRecv = DigitalReceiver(&system_data.digital_data_, &system_data.mission_) |
Macro Definition Documentation
◆ ASMS_IN_PIN
| #define ASMS_IN_PIN BUTTON_1 |
Definition at line 18 of file test_digitalReceiver.cpp.
◆ BUTTON_1
| #define BUTTON_1 7 |
Definition at line 11 of file test_digitalReceiver.cpp.
◆ BUTTON_2
| #define BUTTON_2 8 |
Definition at line 12 of file test_digitalReceiver.cpp.
◆ BUTTON_3
| #define BUTTON_3 9 |
Definition at line 13 of file test_digitalReceiver.cpp.
◆ BUTTON_4
| #define BUTTON_4 10 |
Definition at line 14 of file test_digitalReceiver.cpp.
◆ BUTTON_5
| #define BUTTON_5 11 |
Definition at line 15 of file test_digitalReceiver.cpp.
◆ BUTTON_6
| #define BUTTON_6 12 |
Definition at line 16 of file test_digitalReceiver.cpp.
◆ GREEN_LED_1
| #define GREEN_LED_1 4 |
Definition at line 4 of file test_digitalReceiver.cpp.
◆ GREEN_LED_2
| #define GREEN_LED_2 5 |
Definition at line 5 of file test_digitalReceiver.cpp.
◆ GREEN_LED_3
| #define GREEN_LED_3 6 |
Definition at line 6 of file test_digitalReceiver.cpp.
◆ LWSS_PIN
| #define LWSS_PIN BUTTON_6 |
Definition at line 23 of file test_digitalReceiver.cpp.
◆ PULSES_PER_ROTATION
| #define PULSES_PER_ROTATION 60 |
Definition at line 27 of file test_digitalReceiver.cpp.
◆ RED_LED_1
| #define RED_LED_1 0 |
Definition at line 7 of file test_digitalReceiver.cpp.
◆ RED_LED_2
| #define RED_LED_2 1 |
Definition at line 8 of file test_digitalReceiver.cpp.
◆ SDC_LOGIC_WATCHDOG_IN_PIN
| #define SDC_LOGIC_WATCHDOG_IN_PIN BUTTON_3 |
Definition at line 20 of file test_digitalReceiver.cpp.
◆ SDC_STATE_PIN
| #define SDC_STATE_PIN BUTTON_2 |
Definition at line 19 of file test_digitalReceiver.cpp.
◆ SENSOR_PRESSURE_1_PIN
| #define SENSOR_PRESSURE_1_PIN BUTTON_4 |
Definition at line 21 of file test_digitalReceiver.cpp.
◆ SENSOR_PRESSURE_2_PIN
| #define SENSOR_PRESSURE_2_PIN BUTTON_5 |
Definition at line 22 of file test_digitalReceiver.cpp.
◆ WHEEL_MEASUREMENT_INTERVAL_MIN
| #define WHEEL_MEASUREMENT_INTERVAL_MIN (WHEEL_MEASUREMENT_INTERVAL_MS / 60000.0) |
Definition at line 26 of file test_digitalReceiver.cpp.
◆ WHEEL_MEASUREMENT_INTERVAL_MS
| #define WHEEL_MEASUREMENT_INTERVAL_MS 1000 |
Definition at line 25 of file test_digitalReceiver.cpp.
◆ YELLOW_LED_1
| #define YELLOW_LED_1 2 |
Definition at line 9 of file test_digitalReceiver.cpp.
◆ YELLOW_LED_2
| #define YELLOW_LED_2 3 |
Definition at line 10 of file test_digitalReceiver.cpp.
Function Documentation
◆ main()
| int main | ( | void | ) |
Definition at line 95 of file test_digitalReceiver.cpp.
◆ setUp()
| void setUp | ( | void | ) |
Test the Left Wheel Speed Sensor Check the Left wheel Speed Sensor is being well calculated PROTOCOL:
- Attention
- PROTOCOL TEST
- Click Button 6 once
- Wait 1 second
- Verify LED1 Green Turning On (High) = 1 click (1 rpm with test settings)
- Click Button 6 twice
- Wait 1 second
- Verify LED1 & LED2 Green Turning On (High) = 2 click (2 rpm with test settings)
- Click Button 6 twice
- Wait 1 second
- Verify LED1 & LED2 & LED3 Green Turning On (High) = 3+ click (3+ rpm with test settings) NOTE: do this inside 10 seconds NOTE: moved to C1 Teensy
Definition at line 85 of file test_digitalReceiver.cpp.
Variable Documentation
◆ digitalRecv
| auto digitalRecv = DigitalReceiver(&system_data.digital_data_, &system_data.mission_) |
Definition at line 34 of file test_digitalReceiver.cpp.
◆ system_data
| SystemData system_data |
Definition at line 33 of file test_digitalReceiver.cpp.