Loading...
Searching...
No Matches
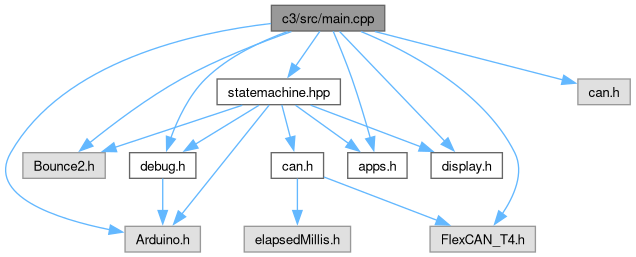
#include <Arduino.h>#include <Bounce2.h>#include <FlexCAN_T4.h>#include "apps.h"#include "can.h"#include "debug.h"#include "display.h"#include "statemachine.hpp"
Include dependency graph for main.cpp:
Go to the source code of this file.
Functions | |
| void | sendMout (int value) |
| void | checkASEmergencySound () |
| void | setup () |
| void | loop () |
Variables | |
| int | current_BMS = 0 |
| elapsedMillis | ASEmergencyTimer |
| volatile bool | disabled = false |
| volatile bool | BTBReady = false |
| volatile bool | transmissionEnabled = false |
| volatile bool | TSOn = false |
| volatile bool | R2DOverride = false |
| volatile bool | ASReady = false |
| FlexCAN_T4< CAN1, RX_SIZE_256, TX_SIZE_16 > | can1 |
| CAN_message_t | statusRequest |
| CAN_message_t | disable |
| CAN_message_t | DCVoltageRequest |
| CAN_message_t | actualSpeedRequest |
| int | speed |
| status | R2DStatus |
| uint8_t | current_byte1 |
| uint8_t | current_byte2 |
| CAN_message_t | current_msg |
| Bounce | r2dButton = Bounce() |
| elapsedMillis | R2DTimer |
| elapsedMillis | APPSTimer |
| elapsedMillis | CURRENTtimer |
| elapsedMicros | mainLoopPeriod |
Function Documentation
◆ checkASEmergencySound()
| void checkASEmergencySound | ( | ) |

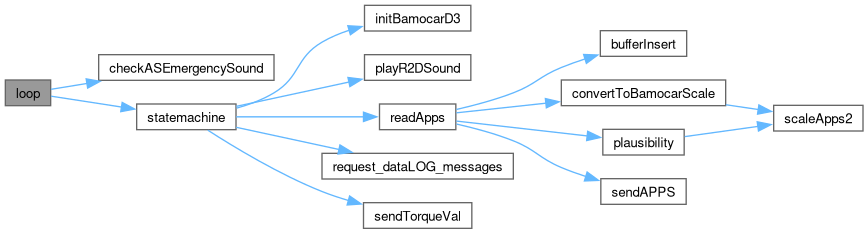
◆ loop()
◆ sendMout()
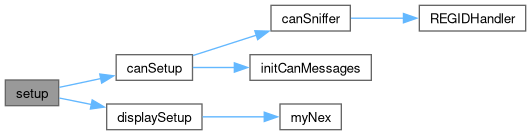
◆ setup()
Variable Documentation
◆ actualSpeedRequest
◆ APPSTimer
|
extern |
Definition at line 30 of file statemachine.hpp.