A ROS2 node for computing and publishing the system's real-time metrics. More...


Public Member Functions | |
| None | __init__ (self) |
| get_config_yaml_path (self, package_name, dir, filename) | |
| load_config (self) | |
| None | signal_handler (self, int sig, frame) |
| Writes metrics to csv and exits when Ctrl+C is pressed. | |
| None | metrics_to_csv (self, list metrics, str filename) |
| None | correction_step_time_callback (self, Float64 msg) |
| Callback function to store the execution time of the correction step. | |
| None | prediction_step_time_callback (self, Float64 msg) |
| None | perception_execution_time_callback (self, Float64 msg) |
| Callback function to store the perception execution time. | |
| None | planning_execution_time_callback (self, Float64 msg) |
| Callback function to store the planning execution time. | |
| None | compute_and_publish_pose (self, np.ndarray pose, np.ndarray groundtruth_pose) |
| Computes state estimation metrics and publishes them. | |
| None | compute_and_publish_map (self, np.ndarray map, np.ndarray groundtruth_map) |
| Computes state estimation metrics and publishes them. | |
| None | compute_and_publish_velocities (self, np.ndarray velocities, np.ndarray groundtruth_velocities) |
| Computes state estimation metrics and publishes them. | |
| None | compute_and_publish_perception (self, np.ndarray perception_output, np.ndarray perception_ground_truth) |
| Computes perception metrics and publishes them. | |
| compute_and_publish_planning (self, np.ndarray path, np.ndarray path_gt, np.ndarray left_cones_gt, np.ndarray right_cones_gt) | |
| Computes planning metrics and publishes them. | |
| compute_and_publish_control (self, Float64 msg) | |
| Computes control metrics and publishes them. | |
Detailed Description
A ROS2 node for computing and publishing the system's real-time metrics.
Definition at line 56 of file evaluator.py.
Constructor & Destructor Documentation
◆ __init__()
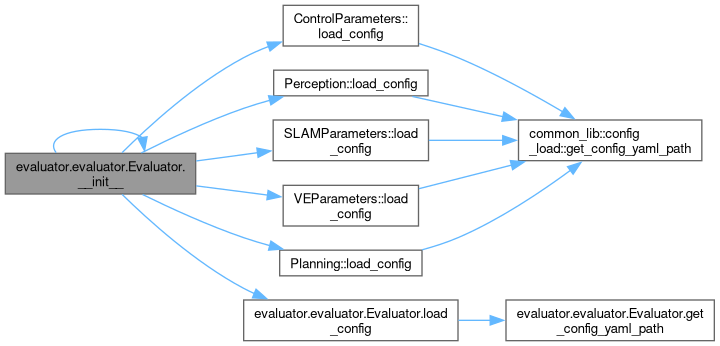
| None evaluator.evaluator.Evaluator.__init__ | ( | self | ) |
Initializes the Evaluator Node.
This function sets up the necessary parameters, subscriptions, and publishers for the Evaluator Node.
It also initializes variables for storing metrics over time.
Parameters:
None
Returns:
None
Definition at line 61 of file evaluator.py.
Member Function Documentation
◆ compute_and_publish_control()
| evaluator.evaluator.Evaluator.compute_and_publish_control | ( | self, | |
| Float64 | msg | ||
| ) |
Computes control metrics and publishes them.
Args: msg (Float64): Control execution time message.
Definition at line 1247 of file evaluator.py.
◆ compute_and_publish_map()
| None evaluator.evaluator.Evaluator.compute_and_publish_map | ( | self, | |
| np.ndarray | map, | ||
| np.ndarray | groundtruth_map | ||
| ) |
Computes state estimation metrics and publishes them.
Args: pose (np.ndarray): Vehicle state estimation data. [x,y,theta] groundtruth_pose (np.ndarray): Ground truth vehicle state data. [x,y,theta] map (np.ndarray): Map data. [[x,y,color,confidence]] groundtruth_map (np.ndarray): Ground truth map data. [[x,y,color,confidence]]
Definition at line 719 of file evaluator.py.
◆ compute_and_publish_perception()
| None evaluator.evaluator.Evaluator.compute_and_publish_perception | ( | self, | |
| np.ndarray | perception_output, | ||
| np.ndarray | perception_ground_truth | ||
| ) |
Computes perception metrics and publishes them.
Args: perception_output (np.ndarray): Perceived cones. perception_ground_truth (np.ndarray): Ground truth cones.
Definition at line 922 of file evaluator.py.
◆ compute_and_publish_planning()
| evaluator.evaluator.Evaluator.compute_and_publish_planning | ( | self, | |
| np.ndarray | path, | ||
| np.ndarray | path_gt, | ||
| np.ndarray | left_cones_gt, | ||
| np.ndarray | right_cones_gt | ||
| ) |
Computes planning metrics and publishes them.
Args: path (np.ndarray): Path computed by the planner. left_cones_gt (np.ndarray): Ground truth of the left cones. right_cones_gt (np.ndarray): Ground truth of the right cones.
Definition at line 1072 of file evaluator.py.
◆ compute_and_publish_pose()
| None evaluator.evaluator.Evaluator.compute_and_publish_pose | ( | self, | |
| np.ndarray | pose, | ||
| np.ndarray | groundtruth_pose | ||
| ) |
Computes state estimation metrics and publishes them.
Args: pose (np.ndarray): Vehicle state estimation data. [x,y,theta] groundtruth_pose (np.ndarray): Ground truth vehicle state data. [x,y,theta]
Definition at line 614 of file evaluator.py.
◆ compute_and_publish_velocities()
| None evaluator.evaluator.Evaluator.compute_and_publish_velocities | ( | self, | |
| np.ndarray | velocities, | ||
| np.ndarray | groundtruth_velocities | ||
| ) |
Computes state estimation metrics and publishes them.
Args: velocities (np.ndarray): Vehicle state velocities. [vx, vy, w] groundtruth_velocities (np.ndarray): Ground truth vehicle state velocities. [vx, vy, w]
Definition at line 826 of file evaluator.py.
◆ correction_step_time_callback()
| None evaluator.evaluator.Evaluator.correction_step_time_callback | ( | self, | |
| Float64 | msg | ||
| ) |
Callback function to store the execution time of the correction step.
Args: msg (Float64): Message containing the correction step execution time. Returns: None
Definition at line 563 of file evaluator.py.
◆ get_config_yaml_path()
| evaluator.evaluator.Evaluator.get_config_yaml_path | ( | self, | |
| package_name, | |||
| dir, | |||
| filename | |||
| ) |

◆ load_config()
| evaluator.evaluator.Evaluator.load_config | ( | self | ) |
Load configuration from YAML file.
Definition at line 467 of file evaluator.py.


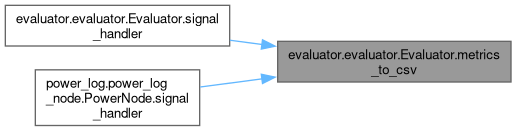
◆ metrics_to_csv()
| None evaluator.evaluator.Evaluator.metrics_to_csv | ( | self, | |
| list | metrics, | ||
| str | filename | ||
| ) |
Converts metrics to csv and writes them to a file.
Args:
metrics (list): A list of dictionaries representing the metrics.
filename (str): The name of the CSV file to write the metrics to.
Returns:
None
Definition at line 540 of file evaluator.py.
◆ perception_execution_time_callback()
| None evaluator.evaluator.Evaluator.perception_execution_time_callback | ( | self, | |
| Float64 | msg | ||
| ) |
Callback function to store the perception execution time.
Args: msg (Float64): Message containing the Perception execution time. Returns: None
Definition at line 588 of file evaluator.py.
◆ planning_execution_time_callback()
| None evaluator.evaluator.Evaluator.planning_execution_time_callback | ( | self, | |
| Float64 | msg | ||
| ) |
Callback function to store the planning execution time.
Args: msg (Float64): Message containing the planning execution time. Returns: None
Definition at line 601 of file evaluator.py.
◆ prediction_step_time_callback()
| None evaluator.evaluator.Evaluator.prediction_step_time_callback | ( | self, | |
| Float64 | msg | ||
| ) |
Callback function to store the execution time of the prediction step.
Args:
msg (Float64): Message containing the prediction step execution time.
Returns:
None
Definition at line 576 of file evaluator.py.
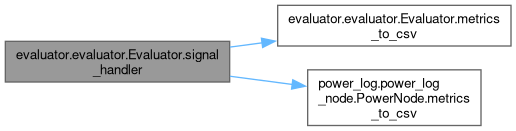
◆ signal_handler()
| None evaluator.evaluator.Evaluator.signal_handler | ( | self, | |
| int | sig, | ||
| frame | |||
| ) |
Writes metrics to csv and exits when Ctrl+C is pressed.
This function is triggered when the program receives a termination signal (e.g., SIGINT or SIGTERM) and it saves the collected metrics to CSV files, then exits the program with a status code of 0. The metrics are saved in separate CSV files based on their category.
Args: sig (int): The signal number. (not used in this function) frame (frame): The current stack frame. (not used in this function) Note:
- Metrics are saved in the "performance/evaluator_metrics" directory as "<metric_name>_<timestamp>.csv".
- If a category has no metrics, no CSV file will be created for that category. Example:
Create an instance of the Evaluator class
evaluator = Evaluator()
Register the signal handler function
signal.signal(signal.SIGINT, evaluator.signal_handler)
Start the program
evaluator.run()
Definition at line 497 of file evaluator.py.
Member Data Documentation
◆ _adapter_name_
|
protected |
Definition at line 77 of file evaluator.py.
◆ _control_count
|
protected |
Definition at line 300 of file evaluator.py.
◆ _control_execution_time_
|
protected |
Definition at line 294 of file evaluator.py.
◆ _control_execution_time_subscription_
|
protected |
Definition at line 165 of file evaluator.py.
◆ _control_position_error_
|
protected |
Definition at line 275 of file evaluator.py.
◆ _control_position_error_sum
|
protected |
Definition at line 298 of file evaluator.py.
◆ _control_position_mean_error_
|
protected |
Definition at line 429 of file evaluator.py.
◆ _control_position_mean_squared_error_
|
protected |
Definition at line 432 of file evaluator.py.
◆ _control_position_root_mean_squared_error_
|
protected |
Definition at line 435 of file evaluator.py.
◆ _control_position_squared_error_sum
|
protected |
Definition at line 299 of file evaluator.py.
◆ _control_velocity_error_
|
protected |
Definition at line 278 of file evaluator.py.
◆ _control_velocity_error_sum
|
protected |
Definition at line 301 of file evaluator.py.
◆ _control_velocity_mean_error_
|
protected |
Definition at line 439 of file evaluator.py.
◆ _control_velocity_mean_squared_error_
|
protected |
Definition at line 442 of file evaluator.py.
◆ _control_velocity_root_mean_squared_error_
|
protected |
Definition at line 447 of file evaluator.py.
◆ _control_velocity_squared_error_sum
|
protected |
Definition at line 302 of file evaluator.py.
◆ _correction_step_time_subscription_
|
protected |
Definition at line 141 of file evaluator.py.
◆ _map_count_
|
protected |
Definition at line 314 of file evaluator.py.
◆ _map_mean_difference_
|
protected |
Definition at line 216 of file evaluator.py.
◆ _map_mean_mean_error
|
protected |
Definition at line 361 of file evaluator.py.
◆ _map_mean_mean_root_squared_error
|
protected |
Definition at line 369 of file evaluator.py.
◆ _map_mean_mean_squared_error
|
protected |
Definition at line 365 of file evaluator.py.
◆ _map_mean_squared_difference_
|
protected |
Definition at line 213 of file evaluator.py.
◆ _map_root_mean_squared_difference_
|
protected |
Definition at line 219 of file evaluator.py.
◆ _perception_count
|
protected |
Definition at line 309 of file evaluator.py.
◆ _perception_execution_time_
|
protected |
Definition at line 296 of file evaluator.py.
◆ _perception_execution_time_subscription_
|
protected |
Definition at line 159 of file evaluator.py.
◆ _perception_false_positives_
|
protected |
Definition at line 189 of file evaluator.py.
◆ _perception_inter_cones_distance_
|
protected |
Definition at line 186 of file evaluator.py.
◆ _perception_mean_difference_
|
protected |
Definition at line 177 of file evaluator.py.
◆ _perception_mean_mean_error
|
protected |
Definition at line 340 of file evaluator.py.
◆ _perception_mean_mean_root_squared_error
|
protected |
Definition at line 348 of file evaluator.py.
◆ _perception_mean_mean_squared_error
|
protected |
Definition at line 344 of file evaluator.py.
◆ _perception_mean_precision
|
protected |
Definition at line 352 of file evaluator.py.
◆ _perception_mean_recall
|
protected |
Definition at line 356 of file evaluator.py.
◆ _perception_mean_squared_difference_
|
protected |
Definition at line 180 of file evaluator.py.
◆ _perception_number_duplicates
|
protected |
Definition at line 198 of file evaluator.py.
◆ _perception_precision_
|
protected |
Definition at line 192 of file evaluator.py.
◆ _perception_precision_sum
|
protected |
Definition at line 307 of file evaluator.py.
◆ _perception_recall_
|
protected |
Definition at line 195 of file evaluator.py.
◆ _perception_recall_sum
|
protected |
Definition at line 308 of file evaluator.py.
◆ _perception_root_mean_squared_difference_
|
protected |
Definition at line 183 of file evaluator.py.
◆ _perception_root_squared_sum_error
|
protected |
Definition at line 306 of file evaluator.py.
◆ _perception_squared_sum_error
|
protected |
Definition at line 305 of file evaluator.py.
◆ _perception_sum_error
|
protected |
Definition at line 304 of file evaluator.py.
◆ _planning_count
|
protected |
Definition at line 337 of file evaluator.py.
◆ _planning_execution_time_
|
protected |
Definition at line 295 of file evaluator.py.
◆ _planning_execution_time_subscription_
|
protected |
Definition at line 153 of file evaluator.py.
◆ _planning_mean_difference_to_cones
|
protected |
Definition at line 264 of file evaluator.py.
◆ _planning_mean_difference_to_gt
|
protected |
Definition at line 234 of file evaluator.py.
◆ _planning_mean_difference_to_left_cones
|
protected |
Definition at line 244 of file evaluator.py.
◆ _planning_mean_difference_to_right_cones
|
protected |
Definition at line 254 of file evaluator.py.
◆ _planning_mean_mean_error
|
protected |
Definition at line 416 of file evaluator.py.
◆ _planning_mean_mean_root_squared_error
|
protected |
Definition at line 424 of file evaluator.py.
◆ _planning_mean_mean_squared_error
|
protected |
Definition at line 420 of file evaluator.py.
◆ _planning_mean_root_squared_sum_error
|
protected |
Definition at line 336 of file evaluator.py.
◆ _planning_mean_squared_difference_to_cones
|
protected |
Definition at line 267 of file evaluator.py.
◆ _planning_mean_squared_difference_to_gt
|
protected |
Definition at line 237 of file evaluator.py.
◆ _planning_mean_squared_difference_to_left_cones
|
protected |
Definition at line 247 of file evaluator.py.
◆ _planning_mean_squared_difference_to_right_cones
|
protected |
Definition at line 257 of file evaluator.py.
◆ _planning_root_mean_squared_difference_to_cones
|
protected |
Definition at line 270 of file evaluator.py.
◆ _planning_root_mean_squared_difference_to_gt
|
protected |
Definition at line 240 of file evaluator.py.
◆ _planning_root_mean_squared_difference_to_left_cones
|
protected |
Definition at line 250 of file evaluator.py.
◆ _planning_root_mean_squared_difference_to_right_cones
|
protected |
Definition at line 260 of file evaluator.py.
◆ _planning_squared_sum_error
|
protected |
Definition at line 335 of file evaluator.py.
◆ _planning_sum_error
|
protected |
Definition at line 334 of file evaluator.py.
◆ _pose_count_
|
protected |
Definition at line 315 of file evaluator.py.
◆ _prediction_step_time_subscription_
|
protected |
Definition at line 147 of file evaluator.py.
◆ _se_correction_execution_time_
|
protected |
Definition at line 292 of file evaluator.py.
◆ _se_difference_with_map_
|
protected |
Definition at line 229 of file evaluator.py.
◆ _se_false_positives_
|
protected |
Definition at line 223 of file evaluator.py.
◆ _se_map_mean_root_squared_sum_error
|
protected |
Definition at line 313 of file evaluator.py.
◆ _se_map_squared_sum_error
|
protected |
Definition at line 312 of file evaluator.py.
◆ _se_map_sum_error
|
protected |
Definition at line 311 of file evaluator.py.
◆ _se_number_duplicates
|
protected |
Definition at line 226 of file evaluator.py.
◆ _se_prediction_execution_time_
|
protected |
Definition at line 293 of file evaluator.py.
◆ _state_estimation_mean_squared_vehicle_pose_error
|
protected |
Definition at line 381 of file evaluator.py.
◆ _state_estimation_mean_squared_velocities_error
|
protected |
Definition at line 401 of file evaluator.py.
◆ _state_estimation_mean_vehicle_pose_error
|
protected |
Definition at line 375 of file evaluator.py.
◆ _state_estimation_mean_velocities_error
|
protected |
Definition at line 395 of file evaluator.py.
◆ _state_estimation_root_mean_squared_vehicle_pose_error
|
protected |
Definition at line 387 of file evaluator.py.
◆ _state_estimation_root_mean_squared_velocities_error
|
protected |
Definition at line 407 of file evaluator.py.
◆ _sum_squared_vehicle_pose_error
|
protected |
Definition at line 327 of file evaluator.py.
◆ _sum_squared_velocities_error
|
protected |
Definition at line 319 of file evaluator.py.
◆ _sum_vehicle_pose_error
|
protected |
Definition at line 326 of file evaluator.py.
◆ _sum_velocities_error
|
protected |
Definition at line 318 of file evaluator.py.
◆ _transforms_listener_
|
protected |
Definition at line 128 of file evaluator.py.
◆ _ve_count_
|
protected |
Definition at line 316 of file evaluator.py.
◆ _vehicle_pose_difference_
|
protected |
Definition at line 208 of file evaluator.py.
◆ _velocities_difference_
|
protected |
Definition at line 203 of file evaluator.py.
◆ absolute_velocity
| evaluator.evaluator.Evaluator.absolute_velocity |
Definition at line 174 of file evaluator.py.
◆ compute_and_publish_control
| evaluator.evaluator.Evaluator.compute_and_publish_control |
Definition at line 168 of file evaluator.py.
◆ control_metrics
| evaluator.evaluator.Evaluator.control_metrics |
Definition at line 291 of file evaluator.py.
◆ correction_step_time_callback
| evaluator.evaluator.Evaluator.correction_step_time_callback |
Definition at line 144 of file evaluator.py.
◆ csv_suffix
| evaluator.evaluator.Evaluator.csv_suffix |
Definition at line 283 of file evaluator.py.
◆ generate_csv
| evaluator.evaluator.Evaluator.generate_csv |
Definition at line 494 of file evaluator.py.
◆ map_metrics
| evaluator.evaluator.Evaluator.map_metrics |
Definition at line 287 of file evaluator.py.
◆ map_subscription_
| evaluator.evaluator.Evaluator.map_subscription_ |
Definition at line 87 of file evaluator.py.
◆ path_points
| evaluator.evaluator.Evaluator.path_points |
Definition at line 172 of file evaluator.py.
◆ perception_execution_time_callback
| evaluator.evaluator.Evaluator.perception_execution_time_callback |
Definition at line 162 of file evaluator.py.
◆ perception_metrics
| evaluator.evaluator.Evaluator.perception_metrics |
Definition at line 286 of file evaluator.py.
◆ perception_subscription_
| evaluator.evaluator.Evaluator.perception_subscription_ |
Definition at line 84 of file evaluator.py.
◆ planning_execution_time_callback
| evaluator.evaluator.Evaluator.planning_execution_time_callback |
Definition at line 156 of file evaluator.py.
◆ planning_gt_subscription_
| evaluator.evaluator.Evaluator.planning_gt_subscription_ |
Definition at line 129 of file evaluator.py.
◆ planning_metrics
| evaluator.evaluator.Evaluator.planning_metrics |
Definition at line 290 of file evaluator.py.
◆ planning_subscription_
| evaluator.evaluator.Evaluator.planning_subscription_ |
Definition at line 96 of file evaluator.py.
◆ pose_metrics
| evaluator.evaluator.Evaluator.pose_metrics |
Definition at line 288 of file evaluator.py.
◆ position
| evaluator.evaluator.Evaluator.position |
Definition at line 173 of file evaluator.py.
◆ prediction_step_time_callback
| evaluator.evaluator.Evaluator.prediction_step_time_callback |
Definition at line 150 of file evaluator.py.
◆ signal_handler
| evaluator.evaluator.Evaluator.signal_handler |
Definition at line 458 of file evaluator.py.
◆ transform_buffer_
| evaluator.evaluator.Evaluator.transform_buffer_ |
Definition at line 127 of file evaluator.py.
◆ use_simulated_perception_
| evaluator.evaluator.Evaluator.use_simulated_perception_ |
Definition at line 478 of file evaluator.py.
◆ use_simulated_planning_
| evaluator.evaluator.Evaluator.use_simulated_planning_ |
Definition at line 485 of file evaluator.py.
◆ use_simulated_se_
| evaluator.evaluator.Evaluator.use_simulated_se_ |
Definition at line 481 of file evaluator.py.
◆ use_simulated_velocities_
| evaluator.evaluator.Evaluator.use_simulated_velocities_ |
Definition at line 482 of file evaluator.py.
◆ vehicle_pose_subscription_
| evaluator.evaluator.Evaluator.vehicle_pose_subscription_ |
Definition at line 93 of file evaluator.py.
◆ vel_estimation_metrics
| evaluator.evaluator.Evaluator.vel_estimation_metrics |
Definition at line 289 of file evaluator.py.
◆ velocities_subscription_
| evaluator.evaluator.Evaluator.velocities_subscription_ |
Definition at line 90 of file evaluator.py.
The documentation for this class was generated from the following file:
- src/evaluator/evaluator/evaluator.py