Loading...
Searching...
No Matches
mocks.cpp File Reference
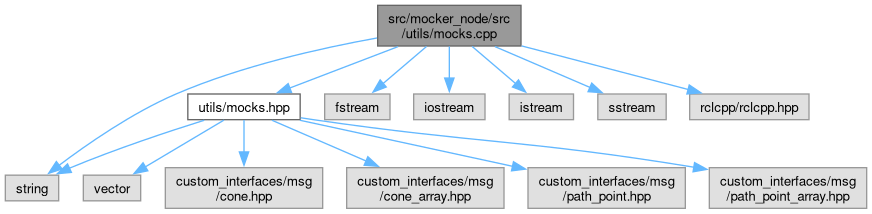
#include "utils/mocks.hpp"#include <fstream>#include <iostream>#include <istream>#include <sstream>#include <string>#include "rclcpp/rclcpp.hpp"
Include dependency graph for mocks.cpp:
Go to the source code of this file.
Functions | |
| custom_interfaces::msg::PathPointArray | planning_gtruth_fromfile (std::istream &in) |
| read planning ground truth information from stream and place it in an array of PathPoint objects | |
| custom_interfaces::msg::ConeArray | se_gtruth_fromfile (std::istream &in) |
| read state estimation ground truth information from stream and place it in an array of Cone objects | |
| std::istream & | open_file_as_stream (const std::string &filename) |
| recieve path to a file and return it as an input stream | |
Function Documentation
◆ open_file_as_stream()
| std::istream & open_file_as_stream | ( | const std::string & | filename | ) |

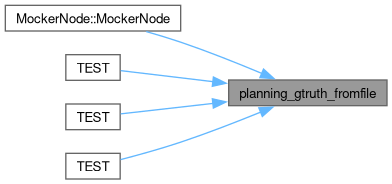
◆ planning_gtruth_fromfile()
| custom_interfaces::msg::PathPointArray planning_gtruth_fromfile | ( | std::istream & | in | ) |
read planning ground truth information from stream and place it in an array of PathPoint objects
- Parameters
-
in input stream to extract the PathPoints from
- Returns
- custom_interfaces::msg::PathPointArray vector with the path points in the ground truth
Definition at line 11 of file mocks.cpp.
Here is the caller graph for this function:
◆ se_gtruth_fromfile()
| custom_interfaces::msg::ConeArray se_gtruth_fromfile | ( | std::istream & | in | ) |
read state estimation ground truth information from stream and place it in an array of Cone objects
- Parameters
-
in input stream to extract the Cones
- Returns
- custom_interfaces::msg::ConeArray vector with the cones in the ground truth
Definition at line 45 of file mocks.cpp.
Here is the caller graph for this function:
