Loading...
Searching...
No Matches
ImuIntegratorTrait Class Referenceabstract
Trait class for IMU integration in SLAM solvers. More...
#include <imu_integrator_trait.hpp>
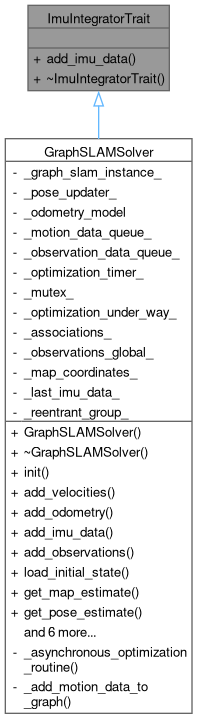
Inheritance diagram for ImuIntegratorTrait:
Collaboration diagram for ImuIntegratorTrait:
Public Member Functions | |
| virtual void | add_imu_data (const common_lib::sensor_data::ImuData &imu_data)=0 |
| Integrate IMU data into the SLAM solver. | |
| virtual | ~ImuIntegratorTrait ()=default |
Detailed Description
Trait class for IMU integration in SLAM solvers.
Definition at line 8 of file imu_integrator_trait.hpp.
Constructor & Destructor Documentation
◆ ~ImuIntegratorTrait()
|
virtualdefault |
Member Function Documentation
◆ add_imu_data()
|
pure virtual |
Integrate IMU data into the SLAM solver.
- Parameters
-
pose_difference Pose difference in the form of [dx, dy, dtheta]
Implemented in GraphSLAMSolver.
The documentation for this class was generated from the following file:
- src/slam/include/slam_solver/solver_traits/imu_integrator_trait.hpp