Loading...
Searching...
No Matches
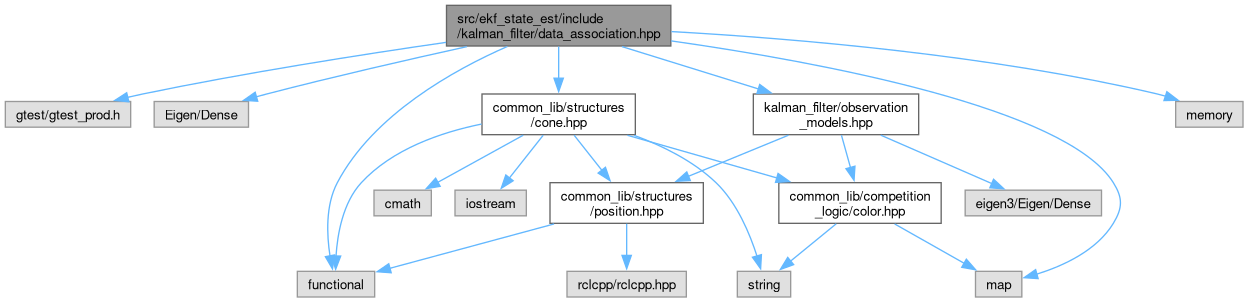
#include <gtest/gtest_prod.h>#include <Eigen/Dense>#include <functional>#include <map>#include <memory>#include "common_lib/structures/cone.hpp"#include "kalman_filter/observation_models.hpp"
Include dependency graph for data_association.hpp:
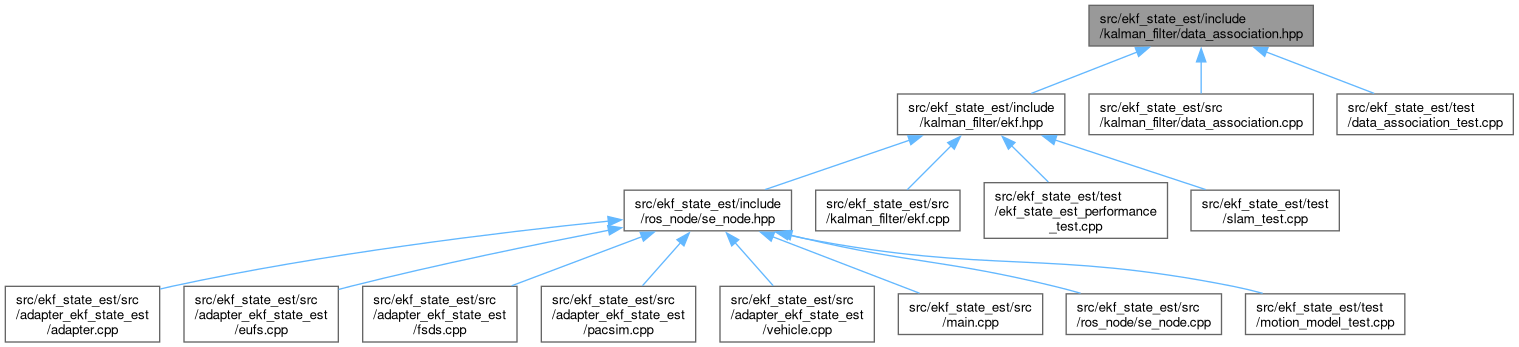
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | DataAssociationModel |
| Data Association Method class, used to match observations to landmarks in the map. More... | |
| class | MaxLikelihood |
| Maximum Likelihood Method class, used to match observations to landmarks in the map with maximum likelihood method It uses the Mahalanobis distance to determine the best match It also uses a gate to determine if the match is valid The Mahalanobis distance is calculated as the square root of the innovation covariance The gate is a threshold that the Mahalanobis distance must be below to be considered a valid match The gate is defined as the normalized innovation squared (NIS) gate Normalized Distance. More... | |
Variables | |
| const std::map< std::string, std::function< std::shared_ptr< DataAssociationModel >(float max_landmark_distance)>, std::less<> > | data_association_model_constructors |
Variable Documentation
◆ data_association_model_constructors
| const std::map<std::string, std::function<std::shared_ptr<DataAssociationModel>(float max_landmark_distance)>, std::less<> > data_association_model_constructors |
Initial value:
= {
{"max_likelihood",
[](float max_landmark_distance) -> std::shared_ptr<DataAssociationModel> {
return std::make_shared<MaxLikelihood>(max_landmark_distance);
}}}
Definition at line 114 of file data_association.hpp.