Loading...
Searching...
No Matches
Clustering Class Referenceabstract
Abstract base class for clustering point clouds. More...
#include <clustering.hpp>
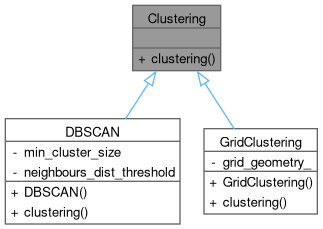
Inheritance diagram for Clustering:
Collaboration diagram for Clustering:

Public Member Functions | |
| virtual void | clustering (const sensor_msgs::msg::PointCloud2::SharedPtr &point_cloud, std::vector< Cluster > *clusters) const =0 |
| Clusters the input point cloud into groups. | |
Detailed Description
Abstract base class for clustering point clouds.
The Clustering class defines an interface for clustering point clouds into groups or clusters. Subclasses must implement the pure virtual function clustering().
Definition at line 14 of file clustering.hpp.
Member Function Documentation
◆ clustering()
|
pure virtual |
Clusters the input point cloud into groups.
This pure virtual function must be implemented by derived classes.
- Parameters
-
point_cloud A shared pointer to a point cloud of type pcl::PointCloud<pcl::PointXYZI>. [out] clusters A pointer to a vector of shared pointers to point clouds to store the resulting clusters.
Implemented in DBSCAN, and GridClustering.
The documentation for this class was generated from the following file:
- src/perception/include/clustering/clustering.hpp