Grid-based clustering algorithm implementation. More...
#include <grid_clustering.hpp>
Public Member Functions | |
| GridClustering (double grid_angle, double grid_radius, double start_augmentation, double radius_augmentation, double fov) | |
| Constructor for the GridClustering algorithm. | |
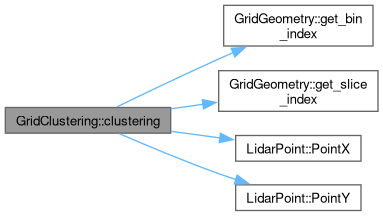
| void | clustering (const sensor_msgs::msg::PointCloud2::SharedPtr &point_cloud, std::vector< Cluster > *clusters) const override |
| Clusters the input point cloud into groups using the GridClustering algorithm. | |
Private Attributes | |
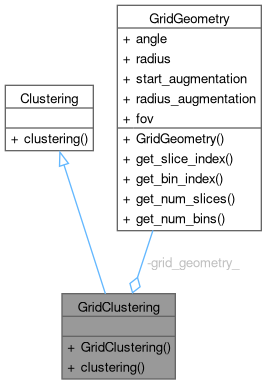
| GridGeometry | grid_geometry_ |
| Geometry of the grid used for clustering. | |
Detailed Description
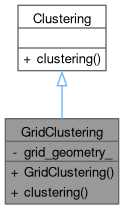
Grid-based clustering algorithm implementation.
implementation.
The GridClustering class is a concrete implementation of the Clustering interface, using a grid-based algorithm to cluster point clouds based on spatial partitioning.
Definition at line 18 of file grid_clustering.hpp.
Constructor & Destructor Documentation
◆ GridClustering()
| GridClustering::GridClustering | ( | double | grid_angle, |
| double | grid_radius, | ||
| double | start_augmentation, | ||
| double | radius_augmentation, | ||
| double | fov | ||
| ) |
Constructor for the GridClustering algorithm.
- Parameters
-
grid_width Width of each grid cell. max_points_per_cluster Maximum number of points allowed in each cluster. min_points_per_cluster Minimum number of points required to form a cluster.
Definition at line 3 of file grid_clustering.cpp.
Member Function Documentation
◆ clustering()
|
overridevirtual |
Clusters the input point cloud into groups using the GridClustering algorithm.
This function implements the clustering method from the Clustering interface.
- Parameters
-
point_cloud A shared pointer to a point cloud of type pcl::PointCloud<pcl::PointXYZI>. clusters A pointer to a vector of shared pointers to point clouds to store the resulting clusters.
Implements Clustering.
Definition at line 7 of file grid_clustering.cpp.
Member Data Documentation
◆ grid_geometry_
|
private |
Geometry of the grid used for clustering.
Definition at line 43 of file grid_clustering.hpp.
The documentation for this class was generated from the following files:
- src/perception/include/clustering/grid_clustering.hpp
- src/perception/src/clustering/grid_clustering.cpp