Loading...
Searching...
No Matches
lap_counter.hpp File Reference
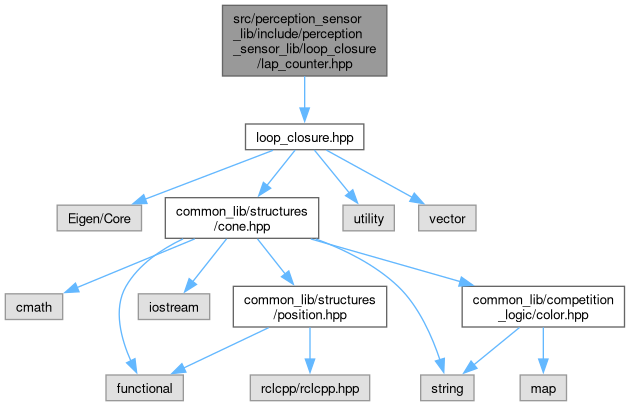
#include "loop_closure.hpp"
Include dependency graph for lap_counter.hpp:
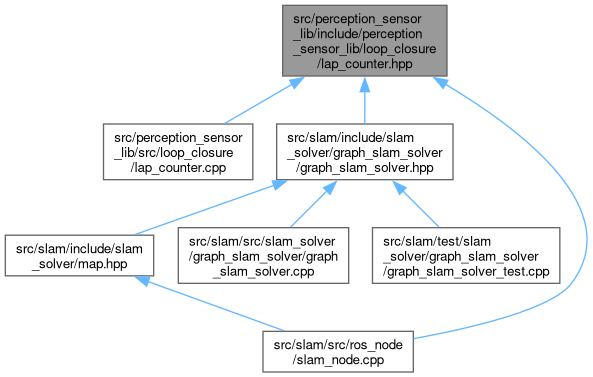
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | LapCounter |
| Implementation of LoopClosure that detects when the robot returns near the origin and re‑observes any of the first X cones from the map. More... | |