Loading...
Searching...
No Matches
ros_node.hpp File Reference
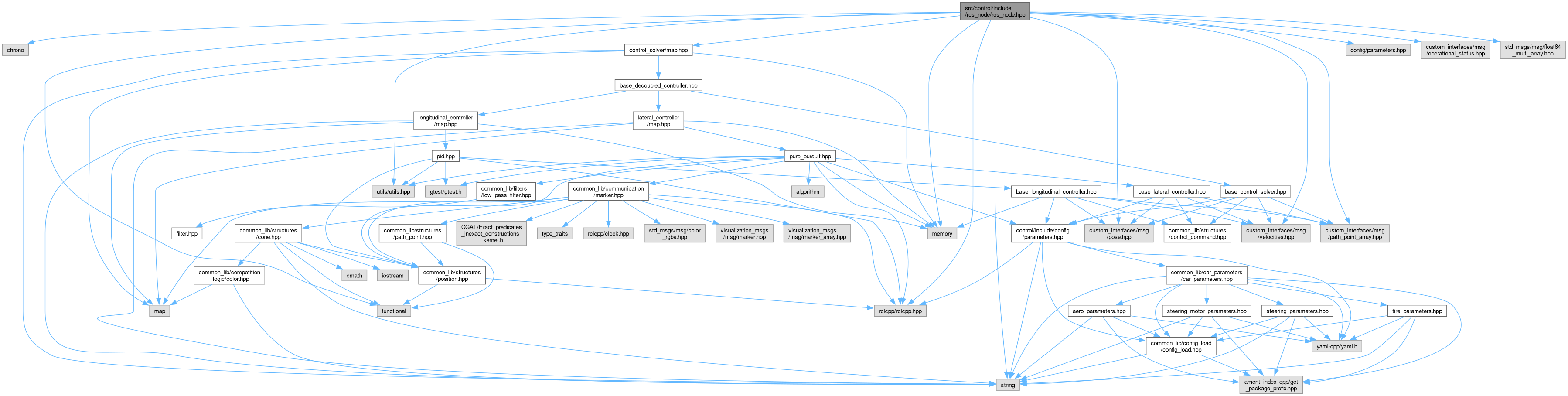
#include <chrono>#include <functional>#include <memory>#include <string>#include "config/parameters.hpp"#include "custom_interfaces/msg/operational_status.hpp"#include "custom_interfaces/msg/path_point_array.hpp"#include "custom_interfaces/msg/pose.hpp"#include "custom_interfaces/msg/velocities.hpp"#include "utils/utils.hpp"#include "rclcpp/rclcpp.hpp"#include "control_solver/map.hpp"#include "std_msgs/msg/float64_multi_array.hpp"
Include dependency graph for ros_node.hpp:
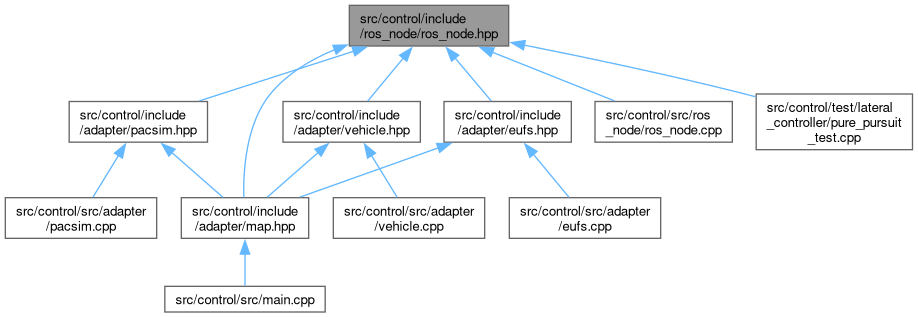
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ControlNode |
| Class responsible for the ROS2 communication of the control module. More... | |