Loading...
Searching...
No Matches
no_rear_wss_ekf.hpp File Reference
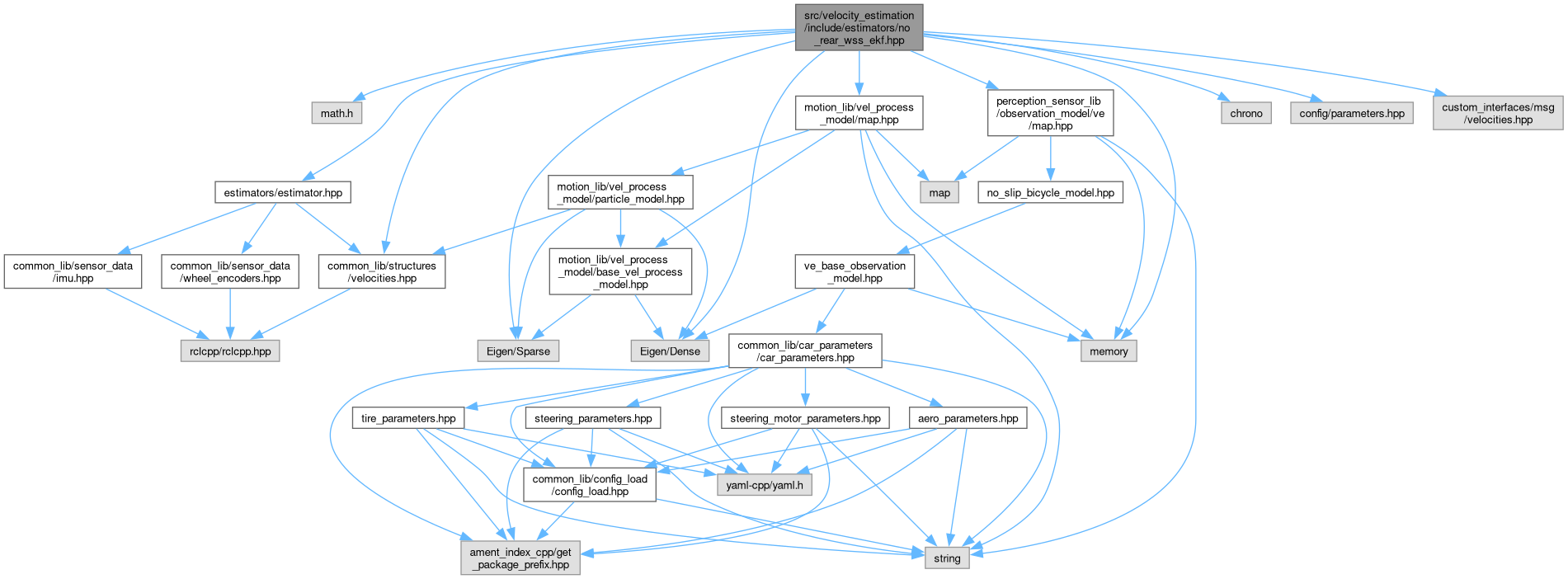
#include <math.h>#include <Eigen/Dense>#include <Eigen/Sparse>#include <chrono>#include <memory>#include "common_lib/structures/velocities.hpp"#include "config/parameters.hpp"#include "custom_interfaces/msg/velocities.hpp"#include "estimators/estimator.hpp"#include "motion_lib/vel_process_model/map.hpp"#include "perception_sensor_lib/observation_model/ve/map.hpp"
Include dependency graph for no_rear_wss_ekf.hpp:
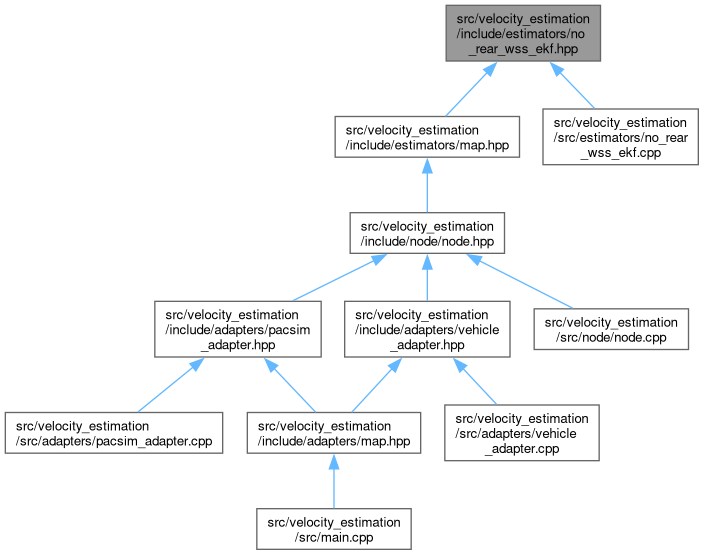
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | NoRearWSSEKF |