Loading...
Searching...
No Matches
difference_based_ready_pose_updater.hpp File Reference
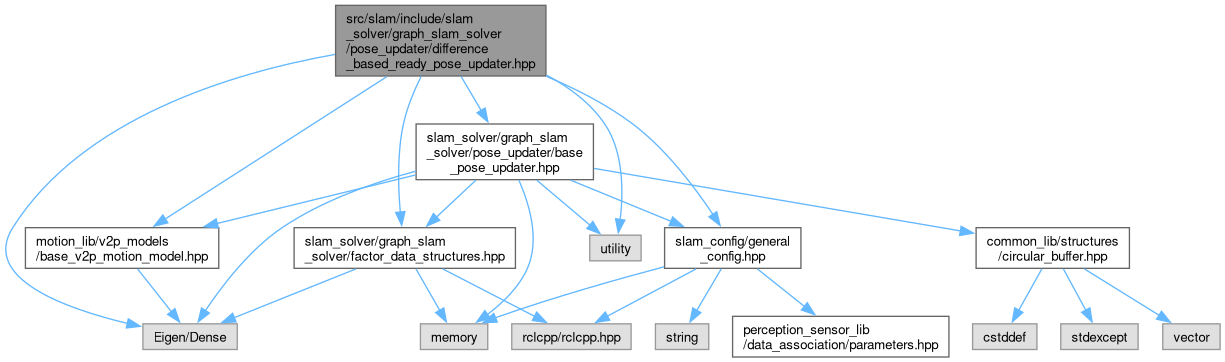
#include <Eigen/Dense>#include <utility>#include "motion_lib/v2p_models/base_v2p_motion_model.hpp"#include "slam_config/general_config.hpp"#include "slam_solver/graph_slam_solver/factor_data_structures.hpp"#include "slam_solver/graph_slam_solver/pose_updater/base_pose_updater.hpp"
Include dependency graph for difference_based_ready_pose_updater.hpp:
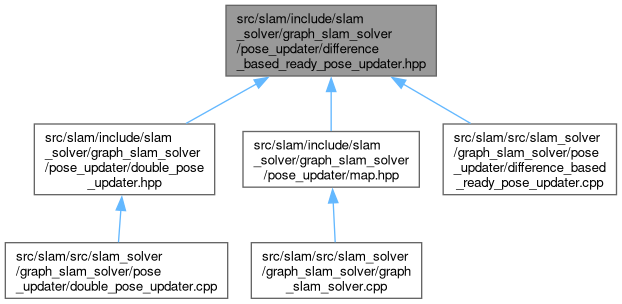
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | DifferenceBasedReadyPoseUpdater |
| Class to update the pose of the vehicle, including a method to check if the pose is ready for graph update depending on the accumulated pose difference. More... | |