Loading...
Searching...
No Matches
slam_test.cpp File Reference
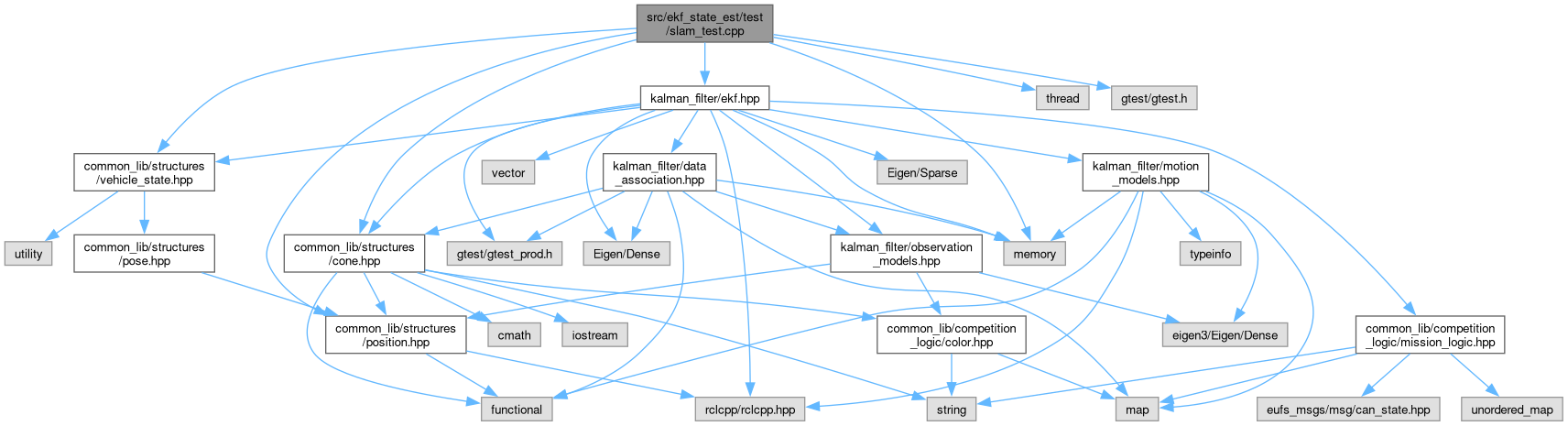
#include <memory>#include <thread>#include "common_lib/structures/cone.hpp"#include "common_lib/structures/position.hpp"#include "common_lib/structures/vehicle_state.hpp"#include "gtest/gtest.h"#include "kalman_filter/ekf.hpp"
Include dependency graph for slam_test.cpp:
Go to the source code of this file.
Functions | |
| TEST (EKF_SLAM, LINEAR_MOVEMENT_INTEGRITY_TEST) | |
| Test the EKF SLAM algorithm in a linear movement. | |
Function Documentation
◆ TEST()
| TEST | ( | EKF_SLAM | , |
| LINEAR_MOVEMENT_INTEGRITY_TEST | |||
| ) |
Test the EKF SLAM algorithm in a linear movement.
This test aims to check if the EKF SLAM is not commiting any atrocity in terms of precision or any calculation errors. The test simulates a very simple linear movement with constant velocity
Definition at line 19 of file slam_test.cpp.