Loading...
Searching...
No Matches
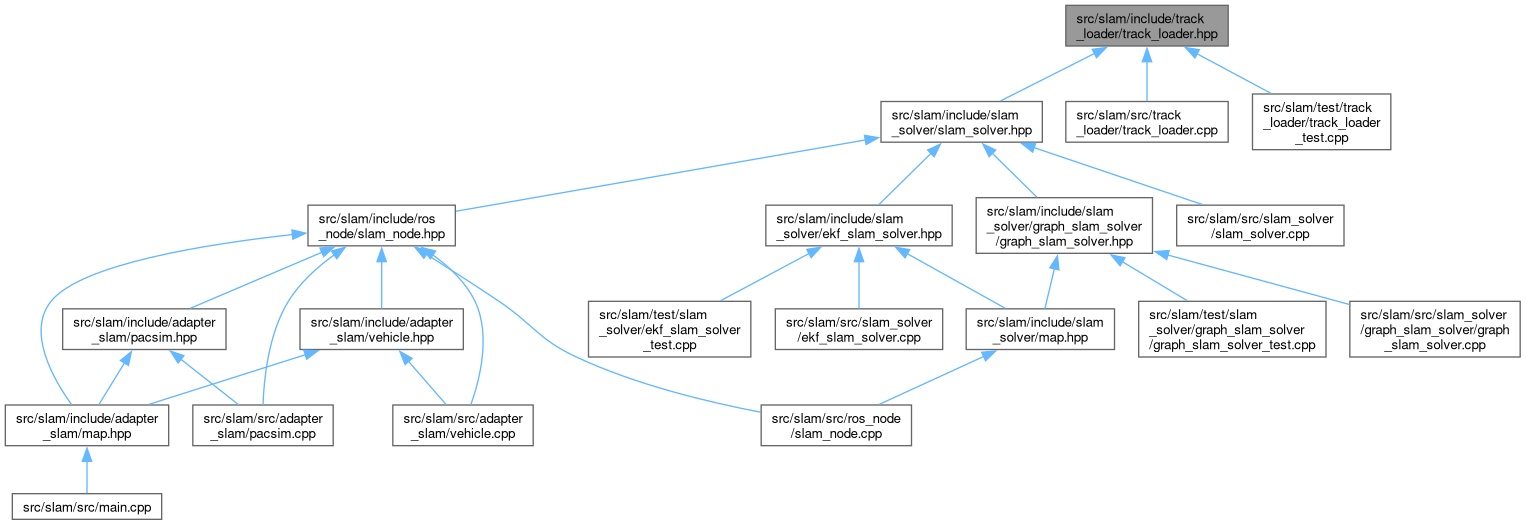
track_loader.hpp File Reference
#include <Eigen/Dense>#include <ament_index_cpp/get_package_prefix.hpp>#include <rclcpp/rclcpp.hpp>#include <string>#include <vector>#include "yaml-cpp/yaml.h"
Include dependency graph for track_loader.hpp:

This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Functions | |
| Node | get_child_node (Node parentNode, std::string tag) |
| Get the child node from a parent node by tag. | |
| void | add_landmarks (Eigen::VectorXd &track, const Node &list) |
| adds the landmarks in the list to the track. | |
| void | load_initial_state (std::string mapPath, Eigen::Vector3d &start_pose, Eigen::VectorXd &track) |
| loads the map from the specified path and fills the start pose and track. | |
| void | load_acceleration_track (Eigen::Vector3d &start_pose, Eigen::VectorXd &track) |
| loads the acceleration track from the default path. | |
| void | load_skidpad_track (Eigen::Vector3d &start_pose, Eigen::VectorXd &track) |
| loads the skidpad track from the default path. | |
| void | transform_track (Eigen::VectorXd &track, Eigen::Vector3d &start_pose) |
| Transforms the track as seen from the start pose. | |
Function Documentation
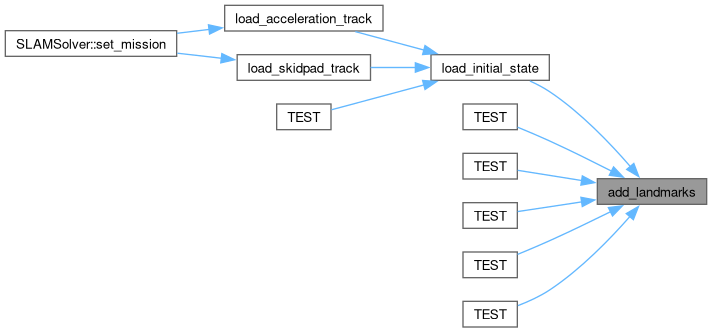
◆ add_landmarks()
| void add_landmarks | ( | Eigen::VectorXd & | track, |
| const Node & | list | ||
| ) |
adds the landmarks in the list to the track.
- Parameters
-
track vector to which the landmarks will be added [x1, y1, x2, y2, ...] list node with landmarks as children each with a "position" key
Definition at line 13 of file track_loader.cpp.
Here is the caller graph for this function:
◆ get_child_node()
| Node get_child_node | ( | Node | parentNode, |
| std::string | tag | ||
| ) |
Get the child node from a parent node by tag.
- Parameters
-
parentNode parent node from which to get the child tag identifier of the child node to get
- Returns
- Node child node with the specified tag
Definition at line 3 of file track_loader.cpp.
Here is the caller graph for this function:

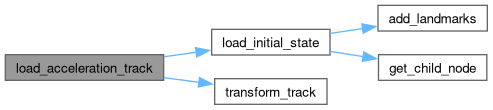
◆ load_acceleration_track()
| void load_acceleration_track | ( | Eigen::Vector3d & | start_pose, |
| Eigen::VectorXd & | track | ||
| ) |
loads the acceleration track from the default path.
- Parameters
-
start_pose vector to fill with the start pose [x, y, theta] track vector to fill with the track data [x1, y1, x2, y2, ...]
Definition at line 47 of file track_loader.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

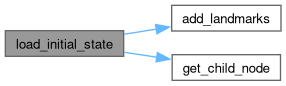
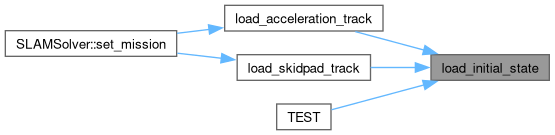
◆ load_initial_state()
| void load_initial_state | ( | std::string | mapPath, |
| Eigen::Vector3d & | start_pose, | ||
| Eigen::VectorXd & | track | ||
| ) |
loads the map from the specified path and fills the start pose and track.
- Parameters
-
mapPath path to the map file start_pose vector to fill with the start pose [x, y, theta] track vector to fill with the track data [x1, y1, x2, y2, ...]
Definition at line 24 of file track_loader.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:
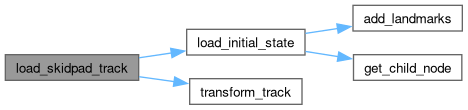
◆ load_skidpad_track()
| void load_skidpad_track | ( | Eigen::Vector3d & | start_pose, |
| Eigen::VectorXd & | track | ||
| ) |
loads the skidpad track from the default path.
- Parameters
-
start_pose vector to fill with the start pose [x, y, theta] track vector to fill with the track data [x1, y1, x2, y2, ...]
Definition at line 54 of file track_loader.cpp.
Here is the call graph for this function:
Here is the caller graph for this function:

◆ transform_track()
| void transform_track | ( | Eigen::VectorXd & | track, |
| Eigen::Vector3d & | start_pose | ||
| ) |
Transforms the track as seen from the start pose.
- Parameters
-
track will be transformed in place to the start pose start_pose will be set to zero after the transformation
Definition at line 61 of file track_loader.cpp.
Here is the caller graph for this function:
