Loading...
Searching...
No Matches
cluster.hpp File Reference
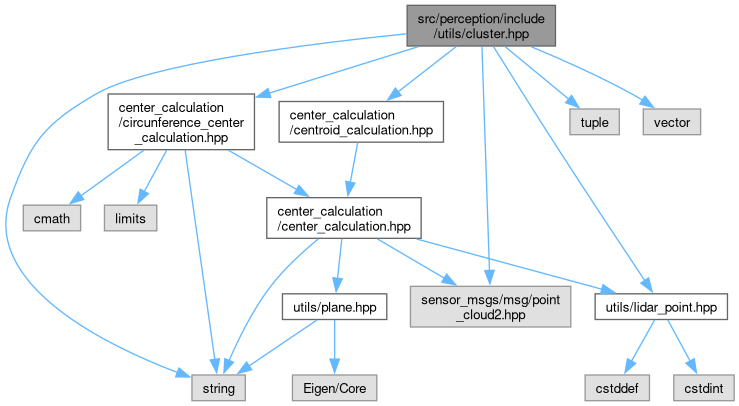
#include <sensor_msgs/msg/point_cloud2.hpp>#include <string>#include <tuple>#include <vector>#include "center_calculation/centroid_calculation.hpp"#include "center_calculation/circunference_center_calculation.hpp"#include "utils/lidar_point.hpp"
Include dependency graph for cluster.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | Cluster |
| Represents a cluster of 3D points using PCL (Point Cloud Library). More... | |