Loading...
Searching...
No Matches
base_landmark_filter.hpp File Reference
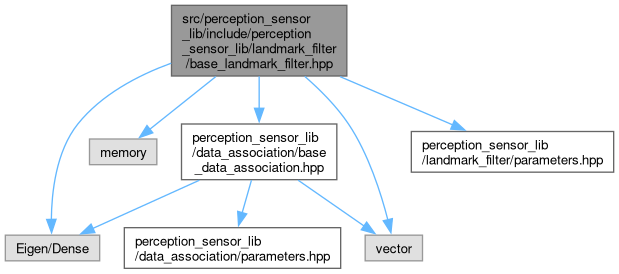
#include <Eigen/Dense>#include <memory>#include <vector>#include "perception_sensor_lib/data_association/base_data_association.hpp"#include "perception_sensor_lib/landmark_filter/parameters.hpp"
Include dependency graph for base_landmark_filter.hpp:
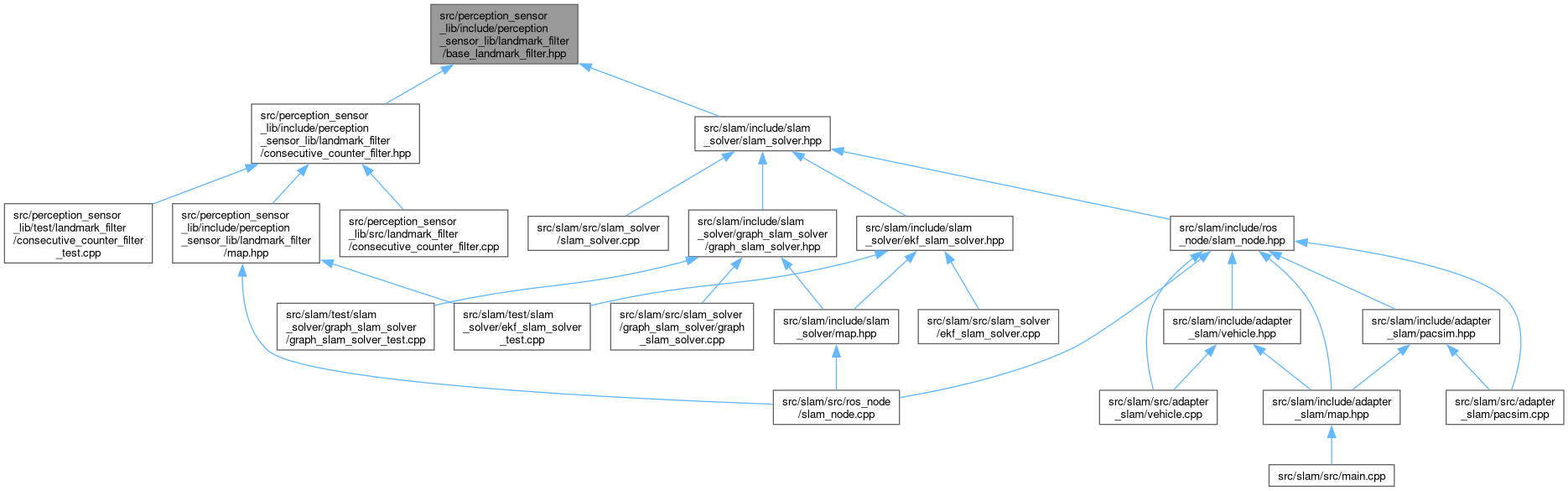
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | LandmarkFilter |
| This class is meant to filter observations from perception to try to reduce the presence of outliers. More... | |