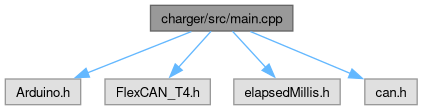
#include <Arduino.h>
#include <FlexCAN_T4.h>
#include <elapsedMillis.h>
#include "can.h"
Go to the source code of this file.
◆ CH_SAFETY_PIN
◆ LATCHING_ERROR_PIN
| #define LATCHING_ERROR_PIN 34 |
◆ MAX_CURRENT
| #define MAX_CURRENT 18000 |
◆ MAX_VOLTAGE
| #define MAX_VOLTAGE 456000 |
◆ SHUTDOWN_PIN
◆ status
| Enumerator |
|---|
| idle | |
| charging | |
| shutdown | |
Definition at line 26 of file main.cpp.
◆ canint()
| void canint |
( |
const CAN_message_t & |
message | ) |
|
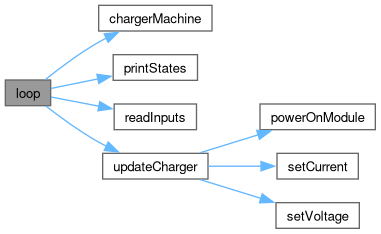
◆ chargerMachine()
◆ loop()
◆ parseMessage()
| void parseMessage |
( |
CAN_message_t |
message | ) |
|
◆ powerOnModule()
| void powerOnModule |
( |
bool |
OnOff | ) |
|
◆ printStates()
◆ readInputs()
◆ setCurrent()
| void setCurrent |
( |
uint32_t |
current | ) |
|
◆ setLOW()
◆ setup()
◆ setVoltage()
| void setVoltage |
( |
uint32_t |
voltage | ) |
|
◆ updateCharger()
| void updateCharger |
( |
status |
CH_Status | ) |
|
◆ can1
| FlexCAN_T4<CAN1, RX_SIZE_256, TX_SIZE_16> can1 |
Write CSV fields feature example.
Definition at line 7 of file main.cpp.
◆ CH_Status
◆ CH_Status_Strings
| String CH_Status_Strings[] = {"idle", "charging", "shutdown"} |
◆ charge
◆ latchingStatus
◆ NX_CH_Status
◆ param
◆ request
◆ shutdownStatus
◆ step
◆ temp