#include "can.h"
#include "debug.h"
Go to the source code of this file.
◆ DC_THRESHOLD
| #define DC_THRESHOLD 4328 |
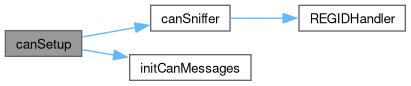
◆ canSetup()
◆ canSniffer()
| void canSniffer |
( |
const CAN_message_t & |
msg | ) |
|
◆ initBamocarD3()
◆ initCanMessages()
Initialize CAN messages.
Definition at line 86 of file can.cpp.
◆ REGIDHandler()
| void REGIDHandler |
( |
const CAN_message_t & |
msg | ) |
|
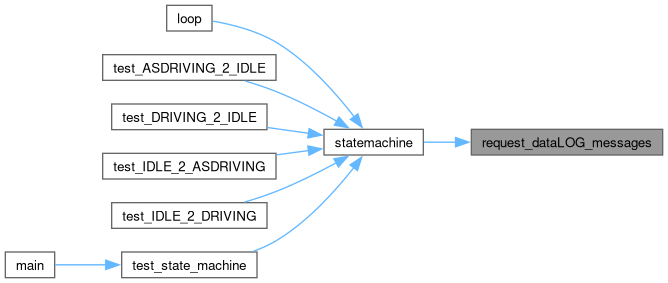
◆ request_dataLOG_messages()
| void request_dataLOG_messages |
( |
| ) |
|
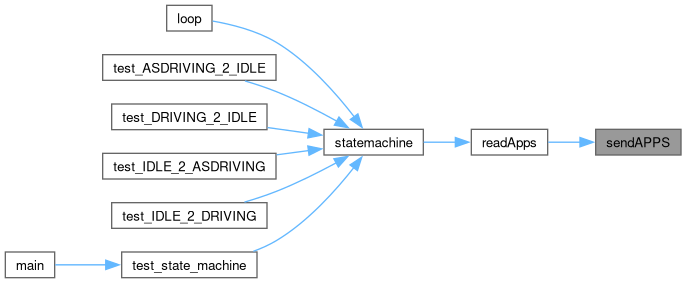
◆ sendAPPS()
| void sendAPPS |
( |
int |
val1, |
|
|
int |
val2 |
|
) |
| |
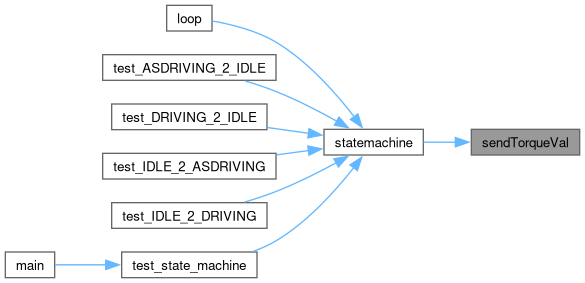
◆ sendTorqueVal()
| void sendTorqueVal |
( |
int |
value_bamo | ) |
|
◆ ACCurrent
◆ actualSpeedRequest
| CAN_message_t actualSpeedRequest |
◆ ASEmergencyTimer
| elapsedMillis ASEmergencyTimer |
◆ ASReady
◆ ASStatus
◆ battery_voltage
| CAN_message_t battery_voltage |
◆ brakeValue
| volatile uint16_t brakeValue |
|
extern |
◆ BTBCyclic
◆ BTBReady
◆ BTBResponse
| CAN_message_t BTBResponse |
◆ BTBStatus
◆ can1
| FlexCAN_T4<CAN1, RX_SIZE_256, TX_SIZE_16> can1 |
Write CSV fields feature example.
Definition at line 4 of file can.cpp.
◆ CANTimeoutMS
| const int CANTimeoutMS = 100 |
◆ CANTimer
◆ clearErrors
| CAN_message_t clearErrors |
◆ current
◆ current_BMS
◆ currentMOTOR
| CAN_message_t currentMOTOR |
◆ DCVoltageRequest
| CAN_message_t DCVoltageRequest |
◆ disable
◆ disabled
◆ enableResponse
| CAN_message_t enableResponse |
◆ entered_emergency
| bool entered_emergency = false |
◆ highTemp
◆ I_actual_filtered
◆ I_con_eff
◆ I_lim_inuse
◆ Ibat
◆ Imax_peak
◆ Iq_actual
◆ Iq_cmd
◆ lowTemp
◆ motorTemp
◆ Mout
◆ Nact
◆ noDisable
◆ packVoltage
◆ powerStageTemp
◆ R2DOverride
| volatile bool R2DOverride |
|
extern |
◆ R2DTimer
◆ rpm
◆ rpmRequest
◆ soc
◆ speed
◆ speedInt
◆ speedRequest
| CAN_message_t speedRequest |
◆ statusRequest
| CAN_message_t statusRequest |
◆ tempBAMO
◆ tempMOTOR
◆ torque_motor
| CAN_message_t torque_motor |
◆ torqueRequest
| CAN_message_t torqueRequest |
◆ Tpeak
◆ transmissionEnabled
| volatile bool transmissionEnabled |
|
extern |
◆ transmissionRequestEnable
| CAN_message_t transmissionRequestEnable |
◆ TSOn
◆ Vbat
◆ VoltageMotor
| CAN_message_t VoltageMotor |
◆ Vout