Loading...
Searching...
No Matches
CenterCalculator Class Referenceabstract
Abstract Class representing the logic for estimating the center position of a cone. More...
#include <center_calculation.hpp>
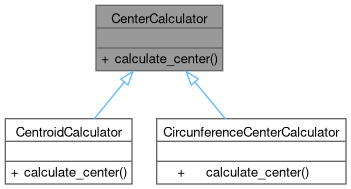
Inheritance diagram for CenterCalculator:
Collaboration diagram for CenterCalculator:
Public Member Functions | |
| virtual Eigen::Vector4f | calculate_center (const sensor_msgs::msg::PointCloud2::SharedPtr &point_cloud, const std::vector< int > &point_indices, const Plane &plane=Plane()) const =0 |
| Estimates the center position of a cone. | |
Detailed Description
Abstract Class representing the logic for estimating the center position of a cone.
This class provides an interface for various methods to estimate the center position of a cone based on its point cloud data, optionally considering a ground plane.
Definition at line 14 of file center_calculation.hpp.
Member Function Documentation
◆ calculate_center()
|
pure virtual |
Estimates the center position of a cone.
This method takes a point cloud representing a cone's cluster and optionally a ground plane to refine the center estimation. The center position is returned as a 4-dimensional vector (Eigen::Vector4f).
- Parameters
-
point_cloud Pointer to the point cloud representing the cone's cluster. plane Plane representing the ground (optional). Default is an empty Plane object.
- Returns
- Eigen::Vector4f representing the estimated center of the cone.
Implemented in CentroidCalculator, and CircunferenceCenterCalculator.
The documentation for this class was generated from the following file:
- src/perception/include/center_calculation/center_calculation.hpp