Loading...
Searching...
No Matches
constant_velocity_turnrate_model.hpp File Reference
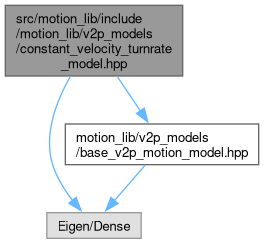
Include dependency graph for constant_velocity_turnrate_model.hpp:
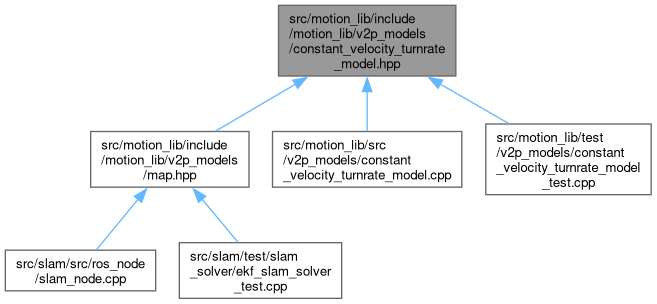
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ConstantVelocityTurnrateModel |
| Motion model that predicts the pose of the robot given the velocities with a constant velocity model and turnrate model. More... | |