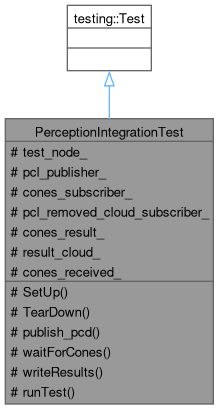
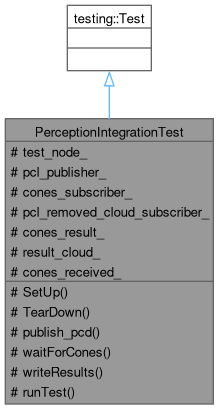
Test class for blackbox perception integration tests.
More...
|
| void | SetUp () override |
| | Flag that determines if the cones were recieved on the test node side.
|
| |
| void | TearDown () override |
| |
| void | publish_pcd (const std::string &input_pcd_path) |
| |
| bool | waitForCones (rclcpp::executors::SingleThreadedExecutor &executor, int timeout_sec=2) |
| |
| void | writeResults (std::string output_pcd_path, int cone_gt, int large_cone_gt) |
| |
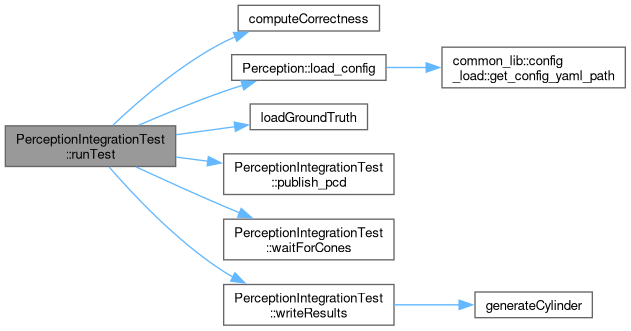
| void | runTest (const std::string test_name, const int cone_gt, const int large_cone_gt, const int min_correctness, const uint8_t mission) |
| |
|
| rclcpp::Node::SharedPtr | test_node_ |
| |
| rclcpp::Publisher< sensor_msgs::msg::PointCloud2 >::SharedPtr | pcl_publisher_ |
| | Test node created to publish a pcl and subsribe to the cones array on the perception node.
|
| |
| rclcpp::Subscription< custom_interfaces::msg::PerceptionOutput >::SharedPtr | cones_subscriber_ |
| |
| rclcpp::Subscription< sensor_msgs::msg::PointCloud2 >::SharedPtr | pcl_removed_cloud_subscriber_ |
| |
| custom_interfaces::msg::ConeArray::SharedPtr | cones_result_ |
| |
| pcl::PointCloud< pcl::PointXYZI >::Ptr | result_cloud_ |
| | Recieves and stores perception node output.
|
| |
| bool | cones_received_ |
| | Cloud that will be filled with the found cones as cylinders and saved in the results file for visualization.
|
| |
Test class for blackbox perception integration tests.
(When using pcd-viewer or other extension the result clouds only update after they are manually reset)
Definition at line 95 of file perception_integration_tests.cpp.
◆ publish_pcd()
| void PerceptionIntegrationTest::publish_pcd |
( |
const std::string & |
input_pcd_path | ) |
|
|
inlineprotected |
◆ runTest()
| void PerceptionIntegrationTest::runTest |
( |
const std::string |
test_name, |
|
|
const int |
cone_gt, |
|
|
const int |
large_cone_gt, |
|
|
const int |
min_correctness, |
|
|
const uint8_t |
mission |
|
) |
| |
|
inlineprotected |
◆ SetUp()
| void PerceptionIntegrationTest::SetUp |
( |
| ) |
|
|
inlineoverrideprotected |
Flag that determines if the cones were recieved on the test node side.
Setup publishers, subscribers and helper functions.
Definition at line 112 of file perception_integration_tests.cpp.
◆ TearDown()
| void PerceptionIntegrationTest::TearDown |
( |
| ) |
|
|
inlineoverrideprotected |
◆ waitForCones()
| bool PerceptionIntegrationTest::waitForCones |
( |
rclcpp::executors::SingleThreadedExecutor & |
executor, |
|
|
int |
timeout_sec = 2 |
|
) |
| |
|
inlineprotected |
◆ writeResults()
| void PerceptionIntegrationTest::writeResults |
( |
std::string |
output_pcd_path, |
|
|
int |
cone_gt, |
|
|
int |
large_cone_gt |
|
) |
| |
|
inlineprotected |
◆ cones_received_
| bool PerceptionIntegrationTest::cones_received_ |
|
protected |
◆ cones_result_
| custom_interfaces::msg::ConeArray::SharedPtr PerceptionIntegrationTest::cones_result_ |
|
protected |
◆ cones_subscriber_
| rclcpp::Subscription<custom_interfaces::msg::PerceptionOutput>::SharedPtr PerceptionIntegrationTest::cones_subscriber_ |
|
protected |
◆ pcl_publisher_
| rclcpp::Publisher<sensor_msgs::msg::PointCloud2>::SharedPtr PerceptionIntegrationTest::pcl_publisher_ |
|
protected |
◆ pcl_removed_cloud_subscriber_
| rclcpp::Subscription<sensor_msgs::msg::PointCloud2>::SharedPtr PerceptionIntegrationTest::pcl_removed_cloud_subscriber_ |
|
protected |
◆ result_cloud_
| pcl::PointCloud<pcl::PointXYZI>::Ptr PerceptionIntegrationTest::result_cloud_ |
|
protected |
◆ test_node_
| rclcpp::Node::SharedPtr PerceptionIntegrationTest::test_node_ |
|
protected |
The documentation for this class was generated from the following file: