Loading...
Searching...
No Matches
AccelerationTrimming Class Reference
#include <acceleration_trimming.hpp>
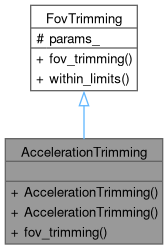
Inheritance diagram for AccelerationTrimming:
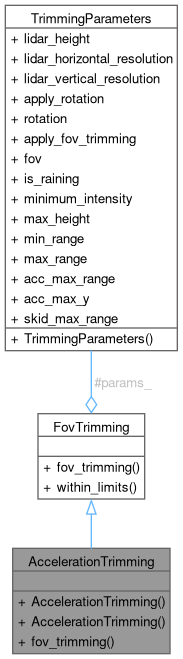
Collaboration diagram for AccelerationTrimming:
Public Member Functions | |
| AccelerationTrimming (const TrimmingParameters params) | |
| Constructor for the Acceleration Point Cloud Trimming algorithm. | |
| AccelerationTrimming ()=default | |
| Default constructor. | |
| void | fov_trimming (const sensor_msgs::msg::PointCloud2::SharedPtr &point_cloud, sensor_msgs::msg::PointCloud2::SharedPtr &trimmed_cloud) const override |
| Perform ground removal on the input point cloud. | |
 Public Member Functions inherited from FovTrimming Public Member Functions inherited from FovTrimming | |
| bool | within_limits (float x, float y, float z, float intensity, const TrimmingParameters ¶ms, const double max_range) const |
Additional Inherited Members | |
| Protected Attributes inherited from FovTrimming | |
| TrimmingParameters | params_ |
Detailed Description
Definition at line 5 of file acceleration_trimming.hpp.
Constructor & Destructor Documentation
◆ AccelerationTrimming() [1/2]
| AccelerationTrimming::AccelerationTrimming | ( | const TrimmingParameters | params | ) |
Constructor for the Acceleration Point Cloud Trimming algorithm.
- Parameters
-
params All trimming related parameters.
Definition at line 3 of file acceleration_trimming.cpp.
◆ AccelerationTrimming() [2/2]
|
default |
Default constructor.
This constructor is provided as a default constructor.
Member Function Documentation
◆ fov_trimming()
|
overridevirtual |
Perform ground removal on the input point cloud.
This pure virtual function must be implemented by derived classes.
- Parameters
-
point_cloud The input point cloud to be processed (trimmed). [out] ret The resulting point cloud after trimming and the corresponding split parameters for GridRANSAC.
Implements FovTrimming.
Definition at line 5 of file acceleration_trimming.cpp.
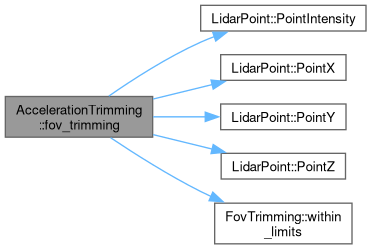
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- src/perception/include/fov_trimming/acceleration_trimming.hpp
- src/perception/src/fov_trimming/acceleration_trimming.cpp