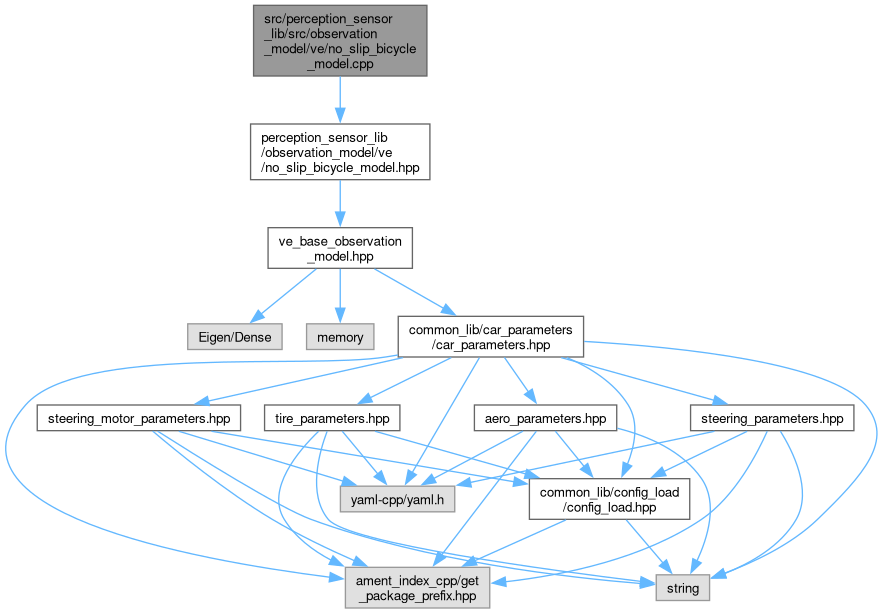
#include "perception_sensor_lib/observation_model/ve/no_slip_bicycle_model.hpp"
Go to the source code of this file.