Loading...
Searching...
No Matches
WheelsSensor Class Reference
#include <wheelsSensor.hpp>
Inheritance diagram for WheelsSensor:
Collaboration diagram for WheelsSensor:
Public Member Functions | |
| WheelsSensor (double rate, double deadTime) | |
| void | readConfig (ConfigElement &config) |
| bool | RunTick (Wheels &in, Eigen::Vector3d &trans, Eigen::Vector3d &rot, double time) |
| Wheels | applyError (Wheels input) |
 Public Member Functions inherited from SensorBase< Wheels > Public Member Functions inherited from SensorBase< Wheels > | |
| double | getRate () |
| Wheels | getOldest () |
| bool | availableDeadTime (double time) |
| bool | sampleReady (double time) |
| void | registerSampling () |
| Eigen::Vector3d | getPosition () |
| Eigen::Vector3d | getOrientation () |
Private Attributes | |
| double | error_mean |
| double | error_sigma |
Additional Inherited Members | |
| Protected Attributes inherited from SensorBase< Wheels > | |
| Eigen::Vector3d | position |
| Eigen::Vector3d | orientation |
| double | rate |
| double | lastSampleTime |
| double | deadTime |
| std::queue< Wheels > | deadTimeQueue |
| int | numFrames |
Detailed Description
Definition at line 10 of file wheelsSensor.hpp.
Constructor & Destructor Documentation
◆ WheelsSensor()
| WheelsSensor::WheelsSensor | ( | double | rate, |
| double | deadTime | ||
| ) |
Definition at line 3 of file wheelsSensor.cpp.
Member Function Documentation
◆ applyError()

◆ readConfig()
| void WheelsSensor::readConfig | ( | ConfigElement & | config | ) |

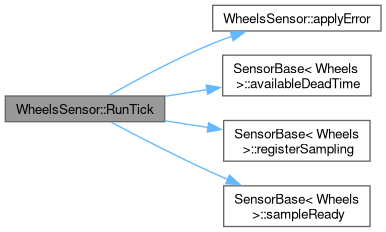
◆ RunTick()
| bool WheelsSensor::RunTick | ( | Wheels & | in, |
| Eigen::Vector3d & | trans, | ||
| Eigen::Vector3d & | rot, | ||
| double | time | ||
| ) |
Member Data Documentation
◆ error_mean
|
private |
Definition at line 22 of file wheelsSensor.hpp.
◆ error_sigma
|
private |
Definition at line 23 of file wheelsSensor.hpp.
The documentation for this class was generated from the following files:
- src/pacsim/include/sensorModels/wheelsSensor.hpp
- src/pacsim/src/sensorModels/wheelsSensor.cpp