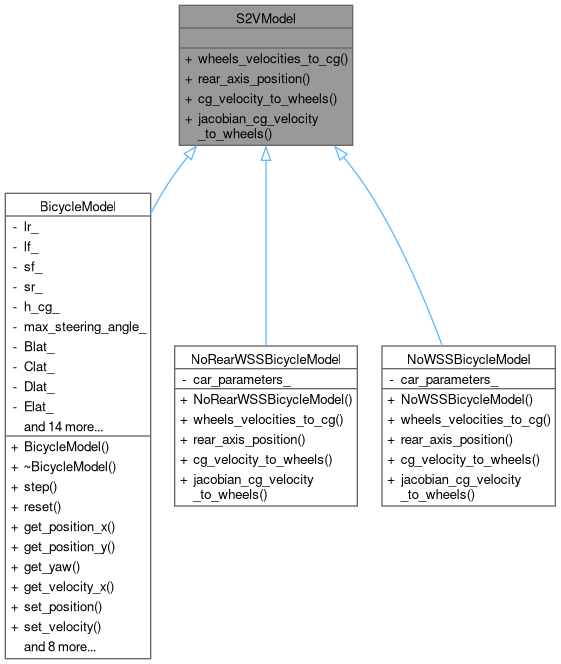
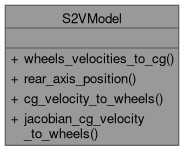
Interface for models that convert data from sensor reference frame to vehicle reference frame and vice versa. More...
#include <s2v_model.hpp>
Public Member Functions | |
| virtual std::pair< double, double > | wheels_velocities_to_cg (double rl_rpm, double fl_rpm, double rr_rpm, double fr_rpm, double steering_angle)=0 |
| Calculates the translational and rotational velocities of the vehicle from wheel rotations and steering angle. | |
| virtual common_lib::structures::Position | rear_axis_position (const common_lib::structures::Position &cg, double orientation, double dist_cg_2_rear_axis)=0 |
| Calculate rear axis coordinates. | |
| virtual Eigen::VectorXd | cg_velocity_to_wheels (const Eigen::Vector3d &cg_velocities)=0 |
| Estimate wheel and motor velocities, as well as steering angle from the velocities of the center of gravity. | |
| virtual Eigen::MatrixXd | jacobian_cg_velocity_to_wheels (const Eigen::Vector3d &cg_velocities)=0 |
| jacobian of the function cg_velocity_to_wheels with respect to the velocities of the center of gravity | |
Detailed Description
Interface for models that convert data from sensor reference frame to vehicle reference frame and vice versa.
Definition at line 12 of file s2v_model.hpp.
Member Function Documentation
◆ cg_velocity_to_wheels()
|
pure virtual |
Estimate wheel and motor velocities, as well as steering angle from the velocities of the center of gravity.
- Parameters
-
cg_velocities vector of velocities on the Center of Gravity {velocity_x, velocity_y, rotational_velocity} in m/s and rad/s respectively
- Returns
- Eigen::VectorXd vector of wheel speeds, steering angle and motor speed {fl_rpm, fr_rpm, rl_rpm, rr_rpm, steering_angle, motor_rpm}
Implemented in BicycleModel, NoRearWSSBicycleModel, and NoWSSBicycleModel.
◆ jacobian_cg_velocity_to_wheels()
|
pure virtual |
jacobian of the function cg_velocity_to_wheels with respect to the velocities of the center of gravity
Each entry at row i and column j of the resulting matrix is the partial derivative of the i-th element of the output of function cg_velocity_to_wheels with respect to the j-th element of the vector cg_velocities
- Parameters
-
cg_velocities vector of velocities on the Center of Gravity {velocity_x, velocity_y, rotational_velocity} in m/s and rad/s respectively
- Returns
- Eigen::MatrixXd jacobian matrix of the function cg_velocity_to_wheels (dimensions: 6x3)
Implemented in BicycleModel, NoRearWSSBicycleModel, and NoWSSBicycleModel.
◆ rear_axis_position()
|
pure virtual |
Calculate rear axis coordinates.
- Parameters
-
cg center of gravity position orientation orientation of the vehicle in radians relative to the world frame (ccw) dist_cg_2_rear_axis distance between the center of gravity and the rear axis
- Returns
- Point
Implemented in BicycleModel, NoRearWSSBicycleModel, and NoWSSBicycleModel.
◆ wheels_velocities_to_cg()
|
pure virtual |
Calculates the translational and rotational velocities of the vehicle from wheel rotations and steering angle.
- Parameters
-
rl_rpm rear left wheel rpms fl_rpm front left wheel rpms rr_rpm rear right wheel rpms fr_rpm front right wheel rpms steering_angle steering angle in radians
- Returns
- std::pair<double, double> translational velocity, rotational velocity
Implemented in BicycleModel, NoRearWSSBicycleModel, and NoWSSBicycleModel.
The documentation for this class was generated from the following file:
- src/motion_lib/include/motion_lib/s2v_model/s2v_model.hpp