Loading...
Searching...
No Matches
data_association.cpp File Reference
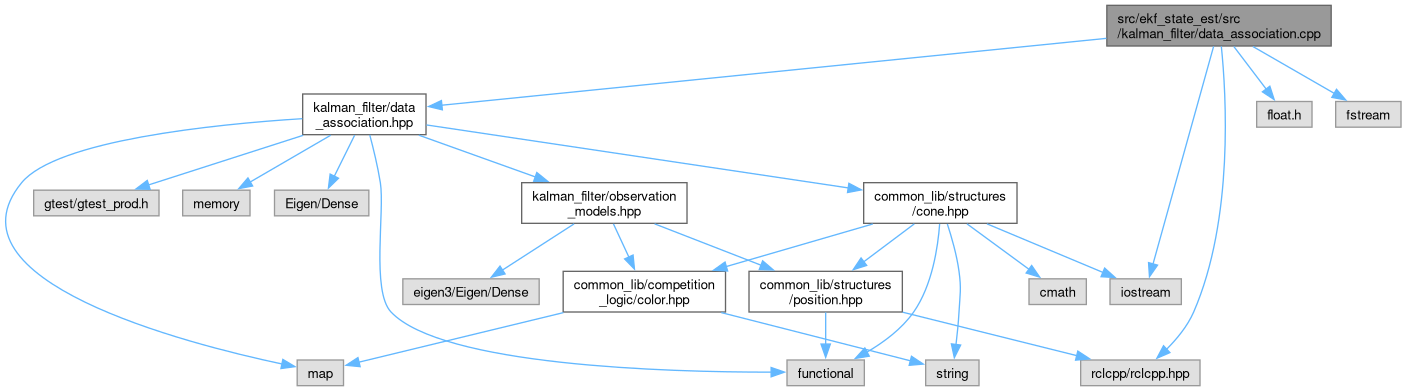
#include "kalman_filter/data_association.hpp"#include <float.h>#include <fstream>#include <iostream>#include <rclcpp/rclcpp.hpp>
Include dependency graph for data_association.cpp: