Loading...
Searching...
No Matches
observation_model_test.cpp File Reference
#include <eigen3/Eigen/Dense>#include <random>#include "gtest/gtest.h"#include "kalman_filter/observation_models.hpp"
Include dependency graph for observation_model_test.cpp:
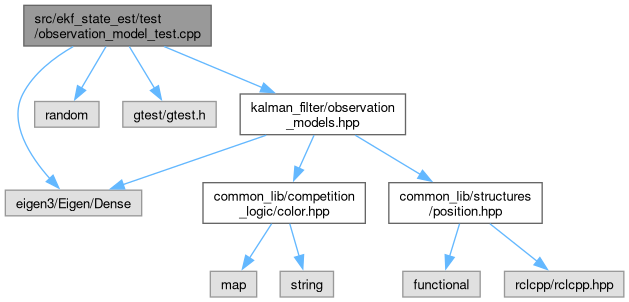
Go to the source code of this file.
Functions | |
| TEST (BASE_OBSERVATION_MODEL, ALIGNED_RANDOM_TEST) | |
| Test the observation model in a scenario where the vehicle is always aligned with the x axis. | |
| TEST (BASE_OBSERVATION_MODEL, INDIVIDUAL_CASE_TEST1) | |
| 45 degrees to the left | |
| TEST (BASE_OBSERVATION_MODEL, INDIVIDUAL_CASE_TEST2) | |
| Straight forward 360 degrees. | |
| TEST (BASE_OBSERVATION_MODEL, INDIVIDUAL_CASE_TEST3) | |
| 90 degrees to the right | |
Function Documentation
◆ TEST() [1/4]
| TEST | ( | BASE_OBSERVATION_MODEL | , |
| ALIGNED_RANDOM_TEST | |||
| ) |
Test the observation model in a scenario where the vehicle is always aligned with the x axis.
Definition at line 12 of file observation_model_test.cpp.
Here is the call graph for this function:
◆ TEST() [2/4]
| TEST | ( | BASE_OBSERVATION_MODEL | , |
| INDIVIDUAL_CASE_TEST1 | |||
| ) |
45 degrees to the left
Definition at line 43 of file observation_model_test.cpp.
Here is the call graph for this function:
◆ TEST() [3/4]
| TEST | ( | BASE_OBSERVATION_MODEL | , |
| INDIVIDUAL_CASE_TEST2 | |||
| ) |
Straight forward 360 degrees.
Definition at line 69 of file observation_model_test.cpp.
Here is the call graph for this function:
◆ TEST() [4/4]
| TEST | ( | BASE_OBSERVATION_MODEL | , |
| INDIVIDUAL_CASE_TEST3 | |||
| ) |
90 degrees to the right
Definition at line 95 of file observation_model_test.cpp.
Here is the call graph for this function: