Loading...
Searching...
No Matches
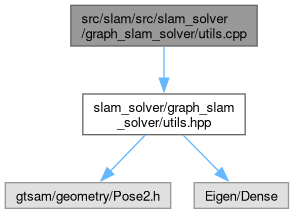
utils.cpp File Reference
#include "slam_solver/graph_slam_solver/utils.hpp"
Include dependency graph for utils.cpp:
Go to the source code of this file.
Functions | |
| gtsam::Pose2 | eigen_to_gtsam_pose (const Eigen::Vector3d &pose) |
| Eigen::Vector3d | gtsam_pose_to_eigen (const gtsam::Pose2 &pose) |
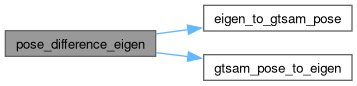
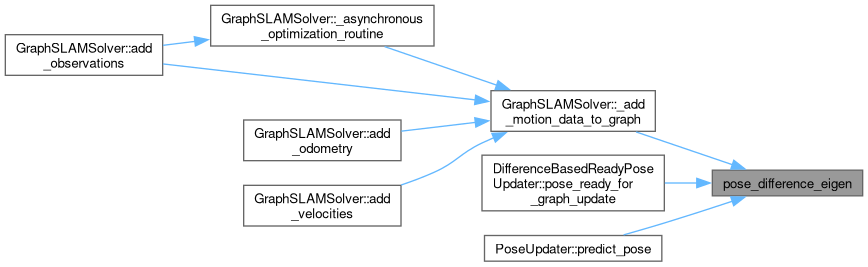
| Eigen::Vector3d | pose_difference_eigen (const Eigen::Vector3d &pose1, const Eigen::Vector3d &pose2) |
Function Documentation
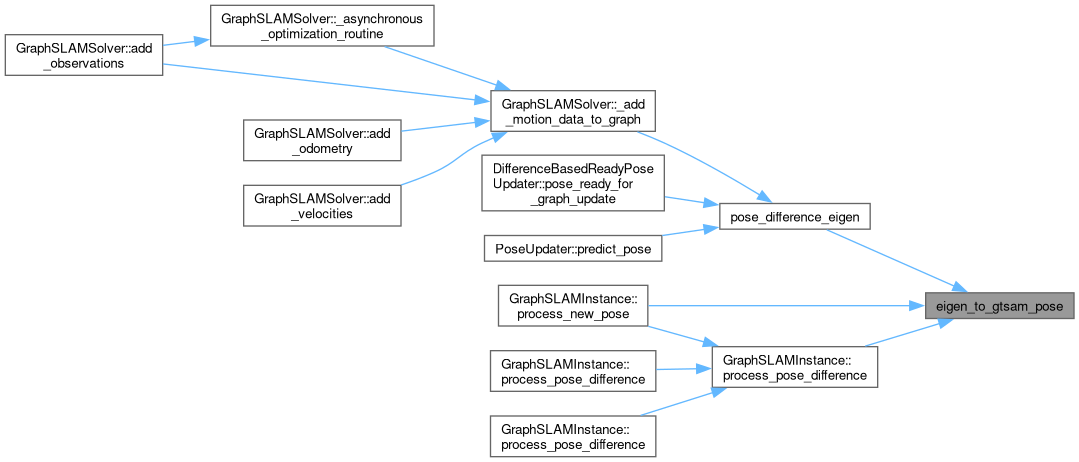
◆ eigen_to_gtsam_pose()
| gtsam::Pose2 eigen_to_gtsam_pose | ( | const Eigen::Vector3d & | pose | ) |
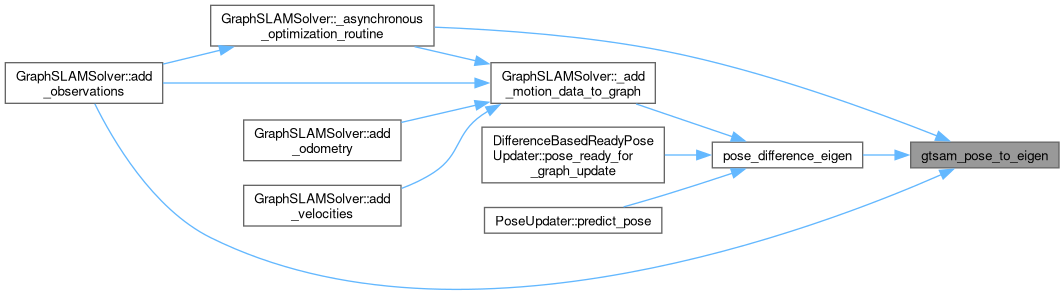
◆ gtsam_pose_to_eigen()
| Eigen::Vector3d gtsam_pose_to_eigen | ( | const gtsam::Pose2 & | pose | ) |