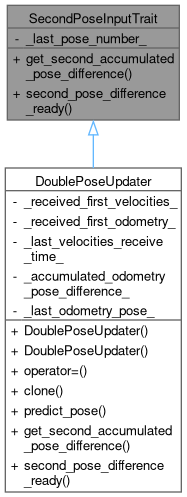
Trait for pose updaters that keep two different pose difference estimates from different sources. More...
#include <second_pose_input_trait.hpp>
Public Member Functions | |
| virtual Eigen::Vector3d | get_second_accumulated_pose_difference () const =0 |
| Get the accumulated pose difference from the second source. | |
| virtual bool | second_pose_difference_ready () const =0 |
| Check if the second pose difference is ready. | |
Private Attributes | |
| int | _last_pose_number_ = 0 |
Detailed Description
Trait for pose updaters that keep two different pose difference estimates from different sources.
This trait defines the interface for pose updaters that keep two different pose difference estimates from different sources e.g. keeping one from odometry and one from velocity estimation and fusing both through factors in the graph
Definition at line 12 of file second_pose_input_trait.hpp.
Member Function Documentation
◆ get_second_accumulated_pose_difference()
|
pure virtual |
Get the accumulated pose difference from the second source.
- Returns
- Eigen::Vector3d The accumulated pose difference from the second source
Implemented in DoublePoseUpdater.
◆ second_pose_difference_ready()
|
pure virtual |
Check if the second pose difference is ready.
- Returns
- true if the second pose difference is ready, false otherwise
Implemented in DoublePoseUpdater.
Member Data Documentation
◆ _last_pose_number_
|
private |
Definition at line 13 of file second_pose_input_trait.hpp.
The documentation for this class was generated from the following file:
- src/slam/include/slam_solver/graph_slam_solver/pose_updater/pose_updater_traits/second_pose_input_trait.hpp