Loading...
Searching...
No Matches
rosbag_groundtruth.rosbag_node.BagNode Class Reference
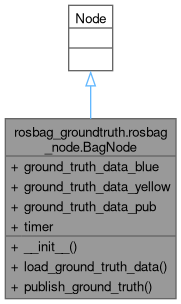
Inheritance diagram for rosbag_groundtruth.rosbag_node.BagNode:
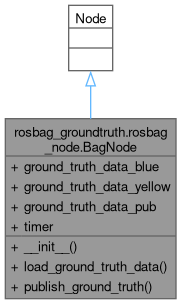
Collaboration diagram for rosbag_groundtruth.rosbag_node.BagNode:
Public Member Functions | |
| __init__ (self, ground_truth_file_1, ground_truth_file_2) | |
| load_ground_truth_data (self, file_path, label) | |
| publish_ground_truth (self) | |
Public Attributes | |
| ground_truth_data_blue | |
| ground_truth_data_yellow | |
| ground_truth_data_pub | |
| timer | |
Detailed Description
Class to load and publish ground truth data from two files as a single MarkerArray message.
Args:
node (rclpy.node.Node): The ROS2 node object.
Definition at line 6 of file rosbag_node.py.
Constructor & Destructor Documentation
◆ __init__()
| rosbag_groundtruth.rosbag_node.BagNode.__init__ | ( | self, | |
| ground_truth_file_1, | |||
| ground_truth_file_2 | |||
| ) |
Definition at line 13 of file rosbag_node.py.
Here is the call graph for this function:
Here is the caller graph for this function:
Member Function Documentation
◆ load_ground_truth_data()
| rosbag_groundtruth.rosbag_node.BagNode.load_ground_truth_data | ( | self, | |
| file_path, | |||
| label | |||
| ) |
Load ground truth data from a file, skipping the header line and assigning each point a label.
Args:
file_path (str): The path to the file containing ground truth data.
label (str): The label to assign to the points.
Returns: ground_truth_data (list): A list of tuples containing the x, y coordinates and label of each point.
Definition at line 29 of file rosbag_node.py.
◆ publish_ground_truth()
| rosbag_groundtruth.rosbag_node.BagNode.publish_ground_truth | ( | self | ) |
Publish the combined ground truth data as a single MarkerArray message. Args: None Returns: None
Definition at line 51 of file rosbag_node.py.
Member Data Documentation
◆ ground_truth_data_blue
| rosbag_groundtruth.rosbag_node.BagNode.ground_truth_data_blue |
Definition at line 16 of file rosbag_node.py.
◆ ground_truth_data_pub
| rosbag_groundtruth.rosbag_node.BagNode.ground_truth_data_pub |
Definition at line 23 of file rosbag_node.py.
◆ ground_truth_data_yellow
| rosbag_groundtruth.rosbag_node.BagNode.ground_truth_data_yellow |
Definition at line 19 of file rosbag_node.py.
◆ timer
| rosbag_groundtruth.rosbag_node.BagNode.timer |
Definition at line 27 of file rosbag_node.py.
The documentation for this class was generated from the following file:
- src/rosbag_groundtruth/rosbag_node.py