Loading...
Searching...
No Matches
GnssData Struct Reference
#include <types.hpp>
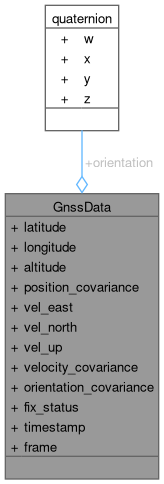
Collaboration diagram for GnssData:
Public Types | |
| enum | FixStatus { NO_FIX = -1 , FIX = 0 } |
Public Attributes | |
| double | latitude |
| double | longitude |
| double | altitude |
| Eigen::Matrix3d | position_covariance |
| double | vel_east |
| double | vel_north |
| double | vel_up |
| Eigen::Matrix3d | velocity_covariance |
| quaternion | orientation |
| Eigen::Matrix3d | orientation_covariance |
| FixStatus | fix_status |
| double | timestamp |
| std::string | frame |
Detailed Description
Member Enumeration Documentation
◆ FixStatus
| enum GnssData::FixStatus |
Member Data Documentation
◆ altitude
◆ fix_status
◆ frame
◆ latitude
◆ longitude
◆ orientation
| quaternion GnssData::orientation |
◆ orientation_covariance
◆ position_covariance
◆ timestamp
◆ vel_east
◆ vel_north
◆ vel_up
◆ velocity_covariance
The documentation for this struct was generated from the following file:
- src/pacsim/include/types.hpp