#include "motion_lib/v2p_models/constant_velocity_model.hpp"#include <gtest/gtest.h>#include <cmath>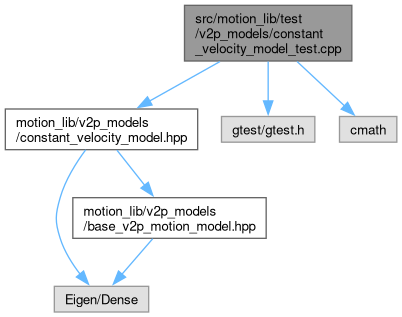
Go to the source code of this file.
Functions | |
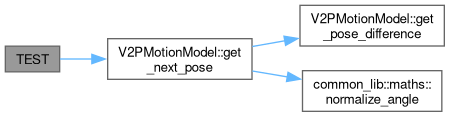
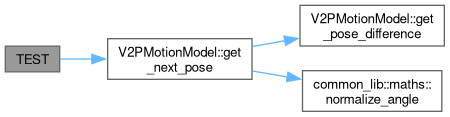
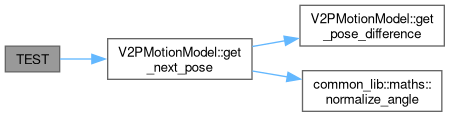
| TEST (CONSTANT_VELOCITY_MODEL, STRAIGHT_LINE_MOVEMENT_TEST_1) | |
| Test the constant velocity model with a straight line movement in the x axis - positive vx. | |
| TEST (CONSTANT_VELOCITY_MODEL, STRAIGHT_LINE_MOVEMENT_TEST_2) | |
| Test the constant velocity model with a straight line movement in the x axis - positive vx. | |
| TEST (CONSTANT_VELOCITY_MODEL, BACKWARDS_MOVEMENT_TEST_1) | |
| Test the constant velocity model with a backwards movement in the x axis - negative vx. | |
| TEST (CONSTANT_VELOCITY_MODEL, BACKWARDS_MOVEMENT_TEST_2) | |
| Test the constant velocity model with a backwards movement in the x axis - positive vx (paradox) | |
| TEST (CONSTANT_VELOCITY_MODEL, BACKWARDS_MOVEMENT_TEST_3) | |
| Test the constant velocity model with a backwards movement in the x axis - negative vy (paradox) | |
| TEST (CONSTANT_VELOCITY_MODEL, ORIENTATION_ANGLE_CAP_TEST_1) | |
| Test the constant velocity model for angle cap on the orientation update - 2PI. | |
| TEST (CONSTANT_VELOCITY_MODEL, ORIENTATION_ANGLE_CAP_TEST_2) | |
| Test the constant velocity model for angle cap on the orientation update - 3PI. | |
| TEST (CONSTANT_VELOCITY_MODEL, ORIENTATION_ANGLE_CAP_TEST_3) | |
| Test the constant velocity model for angle cap on the orientation update - -3PI. | |
| TEST (CONSTANT_VELOCITY_MODEL, ORIENTATION_ANGLE_CAP_TEST_4) | |
| Test the constant velocity model for angle cap on the orientation update - 3PI/2. | |
| TEST (CONSTANT_VELOCITY_MODEL, ORIENTATION_ANGLE_CAP_TEST_5) | |
| Test the constant velocity model for angle cap on the orientation update - -5PI/2. | |
| TEST (CONSTANT_VELOCITY_MODEL, CURVILINEAR_MOVEMENT_TEST_1) | |
| Test the constant velocity model in a straight line movement with a non-zero orientation. | |
| TEST (CONSTANT_VELOCITY_MODEL, CURVILINEAR_MOVEMENT_TEST_2) | |
| Test the constant velocity model in a straight line movement with a negative orientation. | |
| TEST (CONSTANT_VELOCITY_MODEL, CURVILINEAR_MOVEMENT_TEST_3) | |
| Test the constant velocity model in a straight line movement with a perpendicular orientation. | |
Function Documentation
◆ TEST() [1/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| BACKWARDS_MOVEMENT_TEST_1 | |||
| ) |
Test the constant velocity model with a backwards movement in the x axis - negative vx.
Definition at line 68 of file constant_velocity_model_test.cpp.

◆ TEST() [2/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| BACKWARDS_MOVEMENT_TEST_2 | |||
| ) |
Test the constant velocity model with a backwards movement in the x axis - positive vx (paradox)
Definition at line 98 of file constant_velocity_model_test.cpp.
◆ TEST() [3/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| BACKWARDS_MOVEMENT_TEST_3 | |||
| ) |
Test the constant velocity model with a backwards movement in the x axis - negative vy (paradox)
Definition at line 128 of file constant_velocity_model_test.cpp.
◆ TEST() [4/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| CURVILINEAR_MOVEMENT_TEST_1 | |||
| ) |
Test the constant velocity model in a straight line movement with a non-zero orientation.
Definition at line 302 of file constant_velocity_model_test.cpp.
◆ TEST() [5/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| CURVILINEAR_MOVEMENT_TEST_2 | |||
| ) |
Test the constant velocity model in a straight line movement with a negative orientation.
Definition at line 331 of file constant_velocity_model_test.cpp.
◆ TEST() [6/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| CURVILINEAR_MOVEMENT_TEST_3 | |||
| ) |
Test the constant velocity model in a straight line movement with a perpendicular orientation.
Definition at line 361 of file constant_velocity_model_test.cpp.
◆ TEST() [7/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| ORIENTATION_ANGLE_CAP_TEST_1 | |||
| ) |
Test the constant velocity model for angle cap on the orientation update - 2PI.
Definition at line 157 of file constant_velocity_model_test.cpp.
◆ TEST() [8/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| ORIENTATION_ANGLE_CAP_TEST_2 | |||
| ) |
Test the constant velocity model for angle cap on the orientation update - 3PI.
Definition at line 186 of file constant_velocity_model_test.cpp.
◆ TEST() [9/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| ORIENTATION_ANGLE_CAP_TEST_3 | |||
| ) |
Test the constant velocity model for angle cap on the orientation update - -3PI.
Definition at line 215 of file constant_velocity_model_test.cpp.
◆ TEST() [10/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| ORIENTATION_ANGLE_CAP_TEST_4 | |||
| ) |
Test the constant velocity model for angle cap on the orientation update - 3PI/2.
Definition at line 244 of file constant_velocity_model_test.cpp.
◆ TEST() [11/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| ORIENTATION_ANGLE_CAP_TEST_5 | |||
| ) |
Test the constant velocity model for angle cap on the orientation update - -5PI/2.
Definition at line 273 of file constant_velocity_model_test.cpp.
◆ TEST() [12/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| STRAIGHT_LINE_MOVEMENT_TEST_1 | |||
| ) |
Test the constant velocity model with a straight line movement in the x axis - positive vx.
Definition at line 10 of file constant_velocity_model_test.cpp.
◆ TEST() [13/13]
| TEST | ( | CONSTANT_VELOCITY_MODEL | , |
| STRAIGHT_LINE_MOVEMENT_TEST_2 | |||
| ) |
Test the constant velocity model with a straight line movement in the x axis - positive vx.
Definition at line 39 of file constant_velocity_model_test.cpp.