Loading...
Searching...
No Matches
base_pose_updater.cpp File Reference
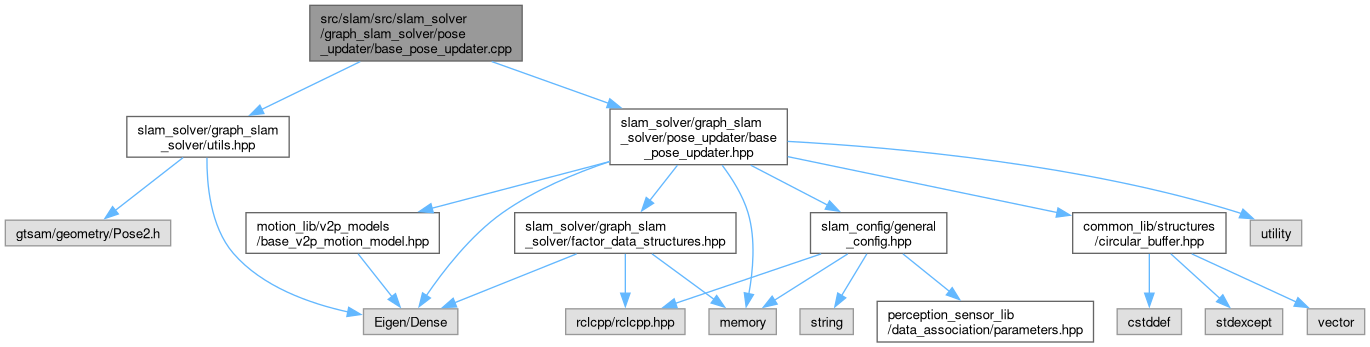
#include "slam_solver/graph_slam_solver/pose_updater/base_pose_updater.hpp"#include "slam_solver/graph_slam_solver/utils.hpp"
Include dependency graph for base_pose_updater.cpp: