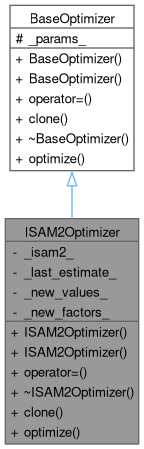
ISAM2 optimizer for graph SLAM. More...
#include <isam2_optimizer.hpp>
Public Member Functions | |
| ISAM2Optimizer (const SLAMParameters ¶ms) | |
| ISAM2Optimizer (const ISAM2Optimizer &other) | |
| ISAM2Optimizer & | operator= (const ISAM2Optimizer &other) |
| ~ISAM2Optimizer () override=default | |
| std::shared_ptr< BaseOptimizer > | clone () const |
| Clone the optimizer. | |
| gtsam::Values | optimize (gtsam::NonlinearFactorGraph &factor_graph, gtsam::Values &graph_values, unsigned int pose_num, unsigned int landmark_num) override |
| Optimize the graph. | |
 Public Member Functions inherited from BaseOptimizer Public Member Functions inherited from BaseOptimizer | |
| BaseOptimizer (const SLAMParameters ¶ms) | |
| BaseOptimizer (const BaseOptimizer &other) | |
| BaseOptimizer & | operator= (const BaseOptimizer &other) |
| virtual | ~BaseOptimizer ()=default |
Private Attributes | |
| gtsam::ISAM2 | _isam2_ |
| gtsam::Values | _last_estimate_ |
| gtsam::Values | _new_values_ |
| gtsam::NonlinearFactorGraph | _new_factors_ |
Friends | |
| class | GraphSLAMInstance |
Additional Inherited Members | |
| Protected Attributes inherited from BaseOptimizer | |
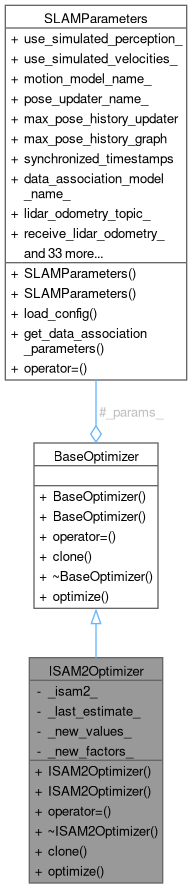
| const SLAMParameters & | _params_ |
Detailed Description
ISAM2 optimizer for graph SLAM.
This class implements the ISAM2 optimizer for graph SLAM It uses the GTSAM ISAM2 implementation to optimize the factor graph incrementally
Definition at line 17 of file isam2_optimizer.hpp.
Constructor & Destructor Documentation
◆ ISAM2Optimizer() [1/2]
| ISAM2Optimizer::ISAM2Optimizer | ( | const SLAMParameters & | params | ) |
Definition at line 18 of file isam2_optimizer.cpp.
◆ ISAM2Optimizer() [2/2]
| ISAM2Optimizer::ISAM2Optimizer | ( | const ISAM2Optimizer & | other | ) |
Definition at line 31 of file isam2_optimizer.cpp.
◆ ~ISAM2Optimizer()
|
overridedefault |
Member Function Documentation
◆ clone()
|
virtual |
Clone the optimizer.
This method is used to create a copy of the optimizer It is useful for polymorphic classes that use pointers to base class
- Returns
- A shared pointer to the cloned optimizer
Implements BaseOptimizer.
Definition at line 51 of file isam2_optimizer.cpp.
◆ operator=()
| ISAM2Optimizer & ISAM2Optimizer::operator= | ( | const ISAM2Optimizer & | other | ) |

◆ optimize()
|
overridevirtual |
Optimize the graph.
This method is used to run the optimization on the graph It also updates the pose and the graph values accordingly afterwards It may change the factor graph ISAM2 optimization is incremental, so it uses its own graph and values to optimize TODO: improve this architecture to avoid confusion
- Parameters
-
factor_graph The factor graph to optimize graph_values The values to optimize pose_num The number of poses in the graph landmark_num The number of landmarks in the graph
- Returns
- The optimized values
Implements BaseOptimizer.
Definition at line 55 of file isam2_optimizer.cpp.
Friends And Related Symbol Documentation
◆ GraphSLAMInstance
|
friend |
Definition at line 57 of file isam2_optimizer.hpp.
Member Data Documentation
◆ _isam2_
|
private |
Definition at line 18 of file isam2_optimizer.hpp.
◆ _last_estimate_
|
private |
Definition at line 19 of file isam2_optimizer.hpp.
◆ _new_factors_
|
private |
Definition at line 21 of file isam2_optimizer.hpp.
◆ _new_values_
|
private |
Definition at line 20 of file isam2_optimizer.hpp.
The documentation for this class was generated from the following files:
- src/slam/include/slam_solver/graph_slam_solver/optimizer/isam2_optimizer.hpp
- src/slam/src/slam_solver/graph_slam_solver/optimizer/isam2_optimizer.cpp