Loading...
Searching...
No Matches
WallRemoval Class Referenceabstract
Abstract base class for wall removal of point clouds. More...
#include <wall_removal.hpp>
Inheritance diagram for WallRemoval:
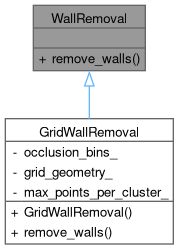
Collaboration diagram for WallRemoval:
Public Member Functions | |
| virtual void | remove_walls (const sensor_msgs::msg::PointCloud2::SharedPtr &point_cloud, sensor_msgs::msg::PointCloud2::SharedPtr &output_cloud)=0 |
| Removes walls from the input point cloud. | |
Detailed Description
Abstract base class for wall removal of point clouds.
The WallRemoval class defines an interface for removing walls from point clouds. Subclasses must implement the pure virtual function remove_walls().
Definition at line 13 of file wall_removal.hpp.
Member Function Documentation
◆ remove_walls()
|
pure virtual |
Removes walls from the input point cloud.
This pure virtual function must be implemented by derived classes.
- Parameters
-
point_cloud The input point cloud output_cloud The output point cloud with walls and big objects removed
Implemented in GridWallRemoval.
The documentation for this class was generated from the following file:
- src/perception/include/wall_removal/wall_removal.hpp