#include "perception_sensor_lib/observation_model/ve/no_slip_bicycle_model.hpp"#include <gtest/gtest.h>#include <cmath>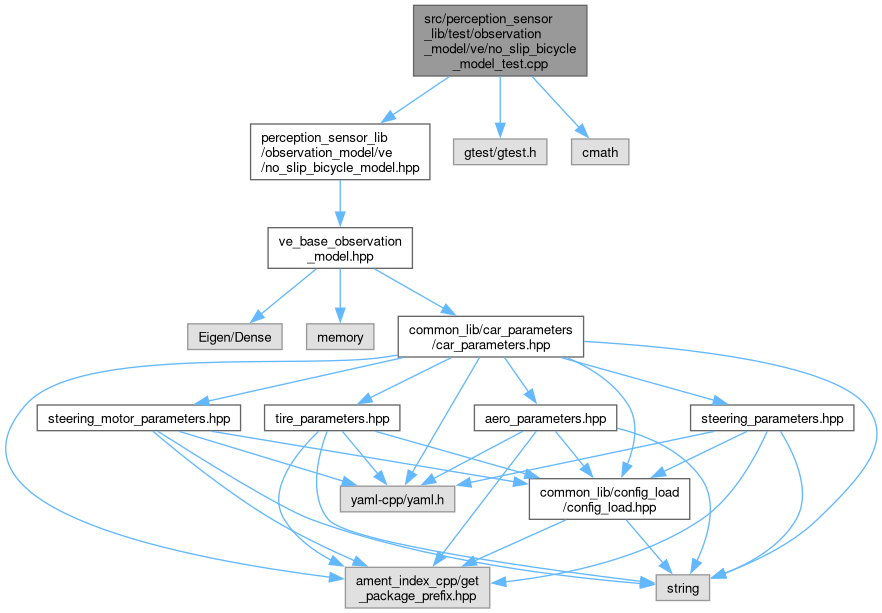
Go to the source code of this file.
Functions | |
| TEST (NoSlipBicycleModelTest, TestCgVelocityToWheels) | |
| Test a regular case of the conversion from wheel velocities to cg velocities. | |
| TEST (NoSlipBicycleModelTest, TestCgVelocityToWheelsNegativeVx) | |
| Test the conversion from cg velocities to wheel velocities when the velocity in x is negative (the car is moving backwards) | |
| TEST (NoSlipBicycleModelTest, TestCgVelocityToWheelsZeroVx) | |
| Test the conversion from cg velocities to wheel velocities when the velocity in x is null and the other velocities are negative. | |
| TEST (NoSlipBicycleModelTest, TestCgVelocityToWheelsZeroVy) | |
| Test the conversion from cg velocities to wheel velocities when the velocities are null. | |
| TEST (NoSlipBicycleModelTest, TestJacobianCgVelocityToWheels) | |
| Test the jacobian of the conversion from cg velocities to wheel velocities with regular values of the velocities. | |
| TEST (NoSlipBicycleModelTest, TestJacobianCgVelocityToWheelsZeroVy) | |
| Test the jacobian of the conversion from cg velocities to wheel velocities when the velocity in x is negative (the car is moving backwards), the velocity in y is null and the angular velocity is negative. | |
Function Documentation
◆ TEST() [1/6]
| TEST | ( | NoSlipBicycleModelTest | , |
| TestCgVelocityToWheels | |||
| ) |
Test a regular case of the conversion from wheel velocities to cg velocities.
Definition at line 13 of file no_slip_bicycle_model_test.cpp.

◆ TEST() [2/6]
| TEST | ( | NoSlipBicycleModelTest | , |
| TestCgVelocityToWheelsNegativeVx | |||
| ) |
Test the conversion from cg velocities to wheel velocities when the velocity in x is negative (the car is moving backwards)
Definition at line 38 of file no_slip_bicycle_model_test.cpp.

◆ TEST() [3/6]
| TEST | ( | NoSlipBicycleModelTest | , |
| TestCgVelocityToWheelsZeroVx | |||
| ) |
Test the conversion from cg velocities to wheel velocities when the velocity in x is null and the other velocities are negative.
Definition at line 64 of file no_slip_bicycle_model_test.cpp.

◆ TEST() [4/6]
| TEST | ( | NoSlipBicycleModelTest | , |
| TestCgVelocityToWheelsZeroVy | |||
| ) |
Test the conversion from cg velocities to wheel velocities when the velocities are null.
Definition at line 90 of file no_slip_bicycle_model_test.cpp.

◆ TEST() [5/6]
| TEST | ( | NoSlipBicycleModelTest | , |
| TestJacobianCgVelocityToWheels | |||
| ) |
Test the jacobian of the conversion from cg velocities to wheel velocities with regular values of the velocities.
Definition at line 116 of file no_slip_bicycle_model_test.cpp.
◆ TEST() [6/6]
| TEST | ( | NoSlipBicycleModelTest | , |
| TestJacobianCgVelocityToWheelsZeroVy | |||
| ) |
Test the jacobian of the conversion from cg velocities to wheel velocities when the velocity in x is negative (the car is moving backwards), the velocity in y is null and the angular velocity is negative.
Definition at line 163 of file no_slip_bicycle_model_test.cpp.