Loading...
Searching...
No Matches
TrajectoryCalculator Class Referenceabstract
Trait class for trajectory calculation in SLAM solvers. More...
#include <trajectory_calculator.hpp>
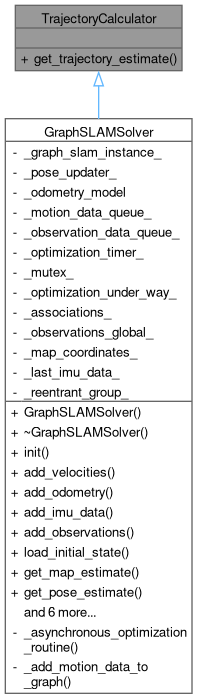
Inheritance diagram for TrajectoryCalculator:
Collaboration diagram for TrajectoryCalculator:
Public Member Functions | |
| virtual std::vector< common_lib::structures::Pose > | get_trajectory_estimate ()=0 |
| Get the trajectory estimate object. | |
Detailed Description
Trait class for trajectory calculation in SLAM solvers.
This trait provides an interface for SLAM solvers to calculate and retrieve the trajectory estimate based on the integrated sensor data.
Definition at line 12 of file trajectory_calculator.hpp.
Member Function Documentation
◆ get_trajectory_estimate()
|
pure virtual |
Get the trajectory estimate object.
- Returns
- std::vector<common_lib::structures::Pose>
Implemented in GraphSLAMSolver.
The documentation for this class was generated from the following file:
- src/slam/include/slam_solver/solver_traits/trajectory_calculator.hpp