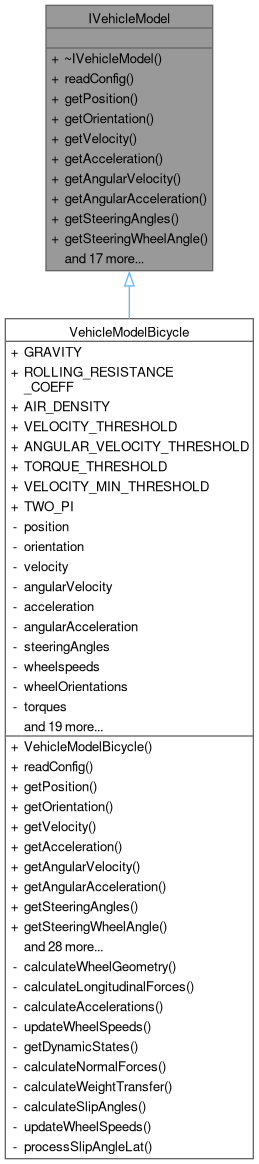
#include <VehicleModelInterface.hpp>
Definition at line 10 of file VehicleModelInterface.hpp.
◆ ~IVehicleModel()
| virtual IVehicleModel::~IVehicleModel |
( |
| ) |
|
|
virtualdefault |
◆ forwardIntegrate()
| virtual void IVehicleModel::forwardIntegrate |
( |
double |
dt | ) |
|
|
pure virtual |
◆ getAcceleration()
| virtual Eigen::Vector3d IVehicleModel::getAcceleration |
( |
| ) |
|
|
pure virtual |
◆ getAngularAcceleration()
| virtual Eigen::Vector3d IVehicleModel::getAngularAcceleration |
( |
| ) |
|
|
pure virtual |
◆ getAngularVelocity()
| virtual Eigen::Vector3d IVehicleModel::getAngularVelocity |
( |
| ) |
|
|
pure virtual |
◆ getCurrentTS()
| virtual double IVehicleModel::getCurrentTS |
( |
| ) |
|
|
pure virtual |
◆ getOrientation()
| virtual Eigen::Vector3d IVehicleModel::getOrientation |
( |
| ) |
|
|
pure virtual |
◆ getPosition()
| virtual Eigen::Vector3d IVehicleModel::getPosition |
( |
| ) |
|
|
pure virtual |
◆ getSteeringAngles()
| virtual Wheels IVehicleModel::getSteeringAngles |
( |
| ) |
|
|
pure virtual |
◆ getSteeringWheelAngle()
| virtual double IVehicleModel::getSteeringWheelAngle |
( |
| ) |
|
|
pure virtual |
◆ getTorques()
| virtual Wheels IVehicleModel::getTorques |
( |
| ) |
|
|
pure virtual |
◆ getVelocity()
| virtual Eigen::Vector3d IVehicleModel::getVelocity |
( |
| ) |
|
|
pure virtual |
◆ getVoltageTS()
| virtual double IVehicleModel::getVoltageTS |
( |
| ) |
|
|
pure virtual |
◆ getWheelOrientations()
| virtual Wheels IVehicleModel::getWheelOrientations |
( |
| ) |
|
|
pure virtual |
◆ getWheelPositions()
| virtual std::array< Eigen::Vector3d, 4 > IVehicleModel::getWheelPositions |
( |
| ) |
|
|
pure virtual |
◆ getWheelspeeds()
| virtual Wheels IVehicleModel::getWheelspeeds |
( |
| ) |
|
|
pure virtual |
◆ readConfig()
| virtual bool IVehicleModel::readConfig |
( |
class ConfigElement & |
config | ) |
|
|
pure virtual |
◆ setMaxTorques()
| virtual void IVehicleModel::setMaxTorques |
( |
Wheels |
in | ) |
|
|
pure virtual |
◆ setMinTorques()
| virtual void IVehicleModel::setMinTorques |
( |
Wheels |
in | ) |
|
|
pure virtual |
◆ setOrientation()
| virtual void IVehicleModel::setOrientation |
( |
Eigen::Vector3d |
orientation | ) |
|
|
pure virtual |
◆ setPosition()
| virtual void IVehicleModel::setPosition |
( |
Eigen::Vector3d |
position | ) |
|
|
pure virtual |
◆ setPowerGroundSetpoint()
| virtual void IVehicleModel::setPowerGroundSetpoint |
( |
double |
in | ) |
|
|
pure virtual |
◆ setRpmSetpoints()
| virtual void IVehicleModel::setRpmSetpoints |
( |
Wheels |
in | ) |
|
|
pure virtual |
◆ setSteeringSetpointFront()
| virtual void IVehicleModel::setSteeringSetpointFront |
( |
double |
in | ) |
|
|
pure virtual |
◆ setSteeringSetpointRear()
| virtual void IVehicleModel::setSteeringSetpointRear |
( |
double |
in | ) |
|
|
pure virtual |
◆ setThrottle()
| virtual void IVehicleModel::setThrottle |
( |
Wheels |
in | ) |
|
|
pure virtual |
◆ setTorques()
| virtual void IVehicleModel::setTorques |
( |
Wheels |
in | ) |
|
|
pure virtual |
The documentation for this class was generated from the following file: