Loading...
Searching...
No Matches
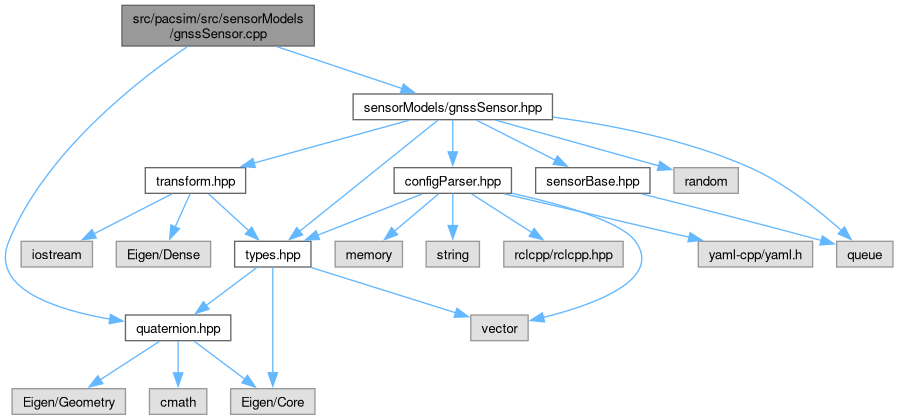
gnssSensor.cpp File Reference
Include dependency graph for gnssSensor.cpp:
Go to the source code of this file.
Functions | |
| Eigen::Vector3d | wgs84toEcef (double lat, double lon, double alt) |
| double | getRn (double latitude) |
| Eigen::Vector3d | ecefToWgs84 (double x, double y, double z) |
| Eigen::Matrix3d | getEnuToEcefRotMat (double lat, double lon) |
Function Documentation
◆ ecefToWgs84()
| Eigen::Vector3d ecefToWgs84 | ( | double | x, |
| double | y, | ||
| double | z | ||
| ) |
Definition at line 78 of file gnssSensor.cpp.
Here is the call graph for this function:

Here is the caller graph for this function:

◆ getEnuToEcefRotMat()
| Eigen::Matrix3d getEnuToEcefRotMat | ( | double | lat, |
| double | lon | ||
| ) |

◆ getRn()
| double getRn | ( | double | latitude | ) |

◆ wgs84toEcef()
| Eigen::Vector3d wgs84toEcef | ( | double | lat, |
| double | lon, | ||
| double | alt | ||
| ) |
