Loading...
Searching...
No Matches
#include <FlexCAN_T4.h>#include <elapsedMillis.h>
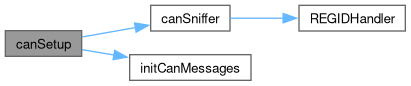
Include dependency graph for can.h:

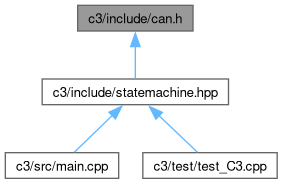
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Macros | |
| #define | C3_ID 0x123 |
| #define | R2D_ID 0x665 |
| #define | BMS_ID 0x675 |
| #define | MASTER_ID 0x300 |
| #define | BAMO_COMMAND_ID 0x201 |
| #define | BAMO_RESPONSE_ID 0x181 |
| #define | REGID_MOUT 0xA0 |
| #define | REGID_IGBT 0x4A |
| #define | REGID_NACT 0xA8 |
| #define | REGID_VOUT 0x8A |
| #define | REGID_T_PEAK 0xF0 |
| #define | REGID_CMD_IQ 0x26 |
| #define | REGID_I_CON_EFF 0xC5 |
| #define | REGID_ACTUAL_IQ 0x27 |
| #define | REGID_I_MAX_PEAK 0xC4 |
| #define | REGID_DC_VOLTAGE 0xEB |
| #define | REGID_AC_CURRENT 0x20 |
| #define | REGID_MOTOR_TEMP 0x49 |
| #define | REGID_I_LIM_INUSE 0x48 |
| #define | REGID_ACTUAL_SPEED 0x30 |
| #define | REGID_I_ACT_FILTERED 0x5F |
| #define | MAX_I 250 |
| #define | ADC_MAX 65536 |
Functions | |
| void | canSetup () |
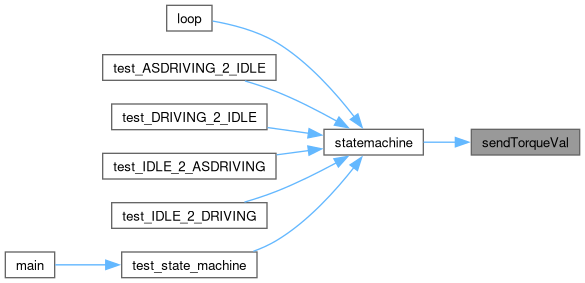
| void | sendTorqueVal (int value_bamo) |
| void | initBamocarD3 () |
| void | request_dataLOG_messages () |
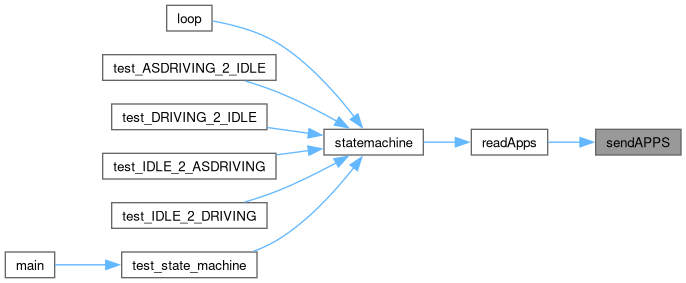
| void | sendAPPS (int val1, int val2) |
Macro Definition Documentation
◆ ADC_MAX
◆ BAMO_COMMAND_ID
◆ BAMO_RESPONSE_ID
◆ BMS_ID
◆ C3_ID
◆ MASTER_ID
◆ MAX_I
◆ R2D_ID
◆ REGID_AC_CURRENT
◆ REGID_ACTUAL_IQ
◆ REGID_ACTUAL_SPEED
◆ REGID_CMD_IQ
◆ REGID_DC_VOLTAGE
◆ REGID_I_ACT_FILTERED
◆ REGID_I_CON_EFF
◆ REGID_I_LIM_INUSE
◆ REGID_I_MAX_PEAK
◆ REGID_IGBT
◆ REGID_MOTOR_TEMP
◆ REGID_MOUT
◆ REGID_NACT
◆ REGID_T_PEAK
◆ REGID_VOUT
Function Documentation
◆ canSetup()
| void canSetup | ( | ) |

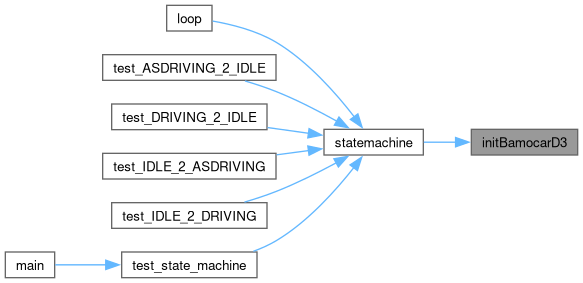
◆ initBamocarD3()
| void initBamocarD3 | ( | ) |
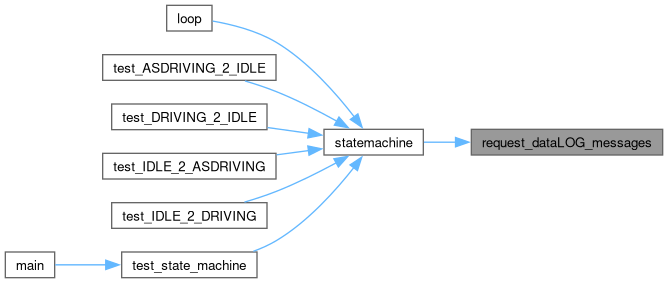
◆ request_dataLOG_messages()
| void request_dataLOG_messages | ( | ) |
◆ sendAPPS()
| void sendAPPS | ( | int | val1, |
| int | val2 | ||
| ) |