Loading...
Searching...
No Matches
Constants and helper functions for accessing LiDAR point cloud data. More...
Functions | |
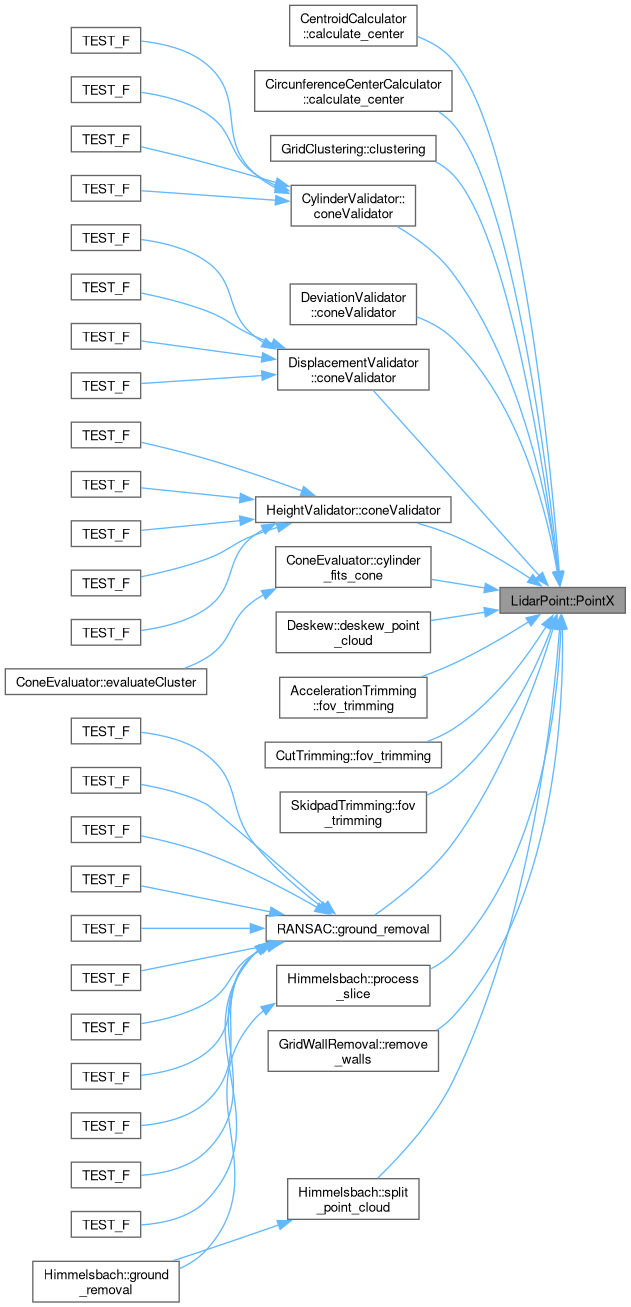
| constexpr size_t | PointX (size_t idx) |
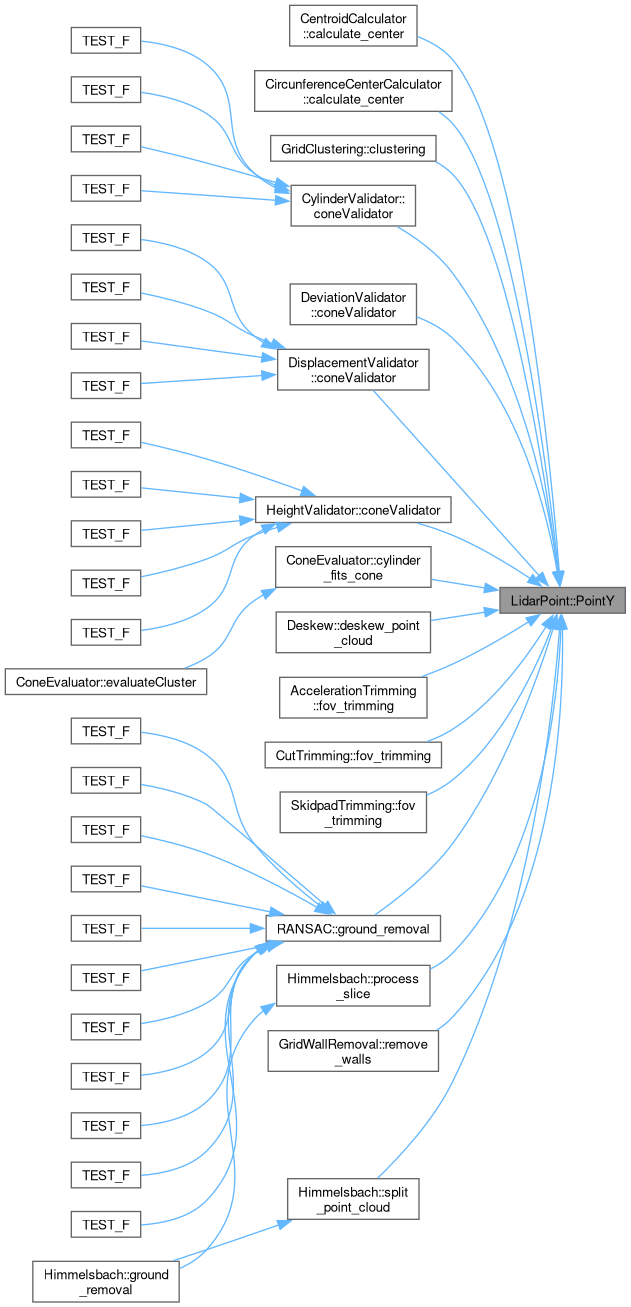
| constexpr size_t | PointY (size_t idx) |
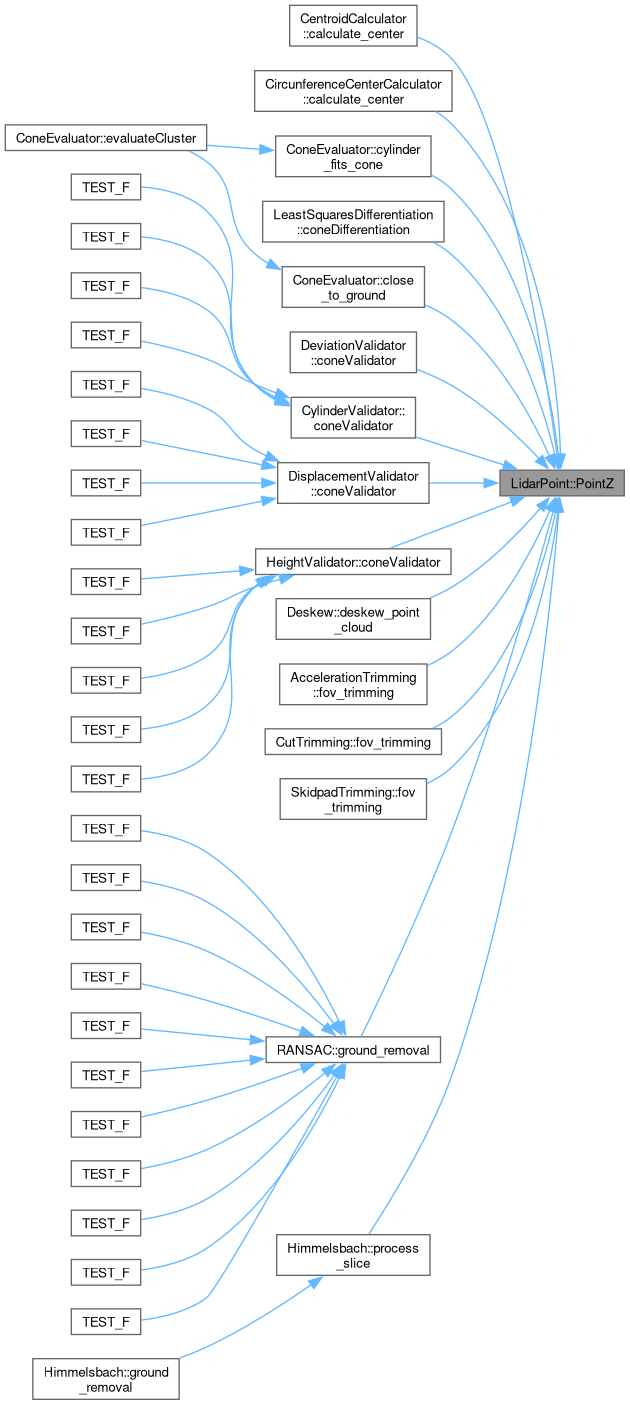
| constexpr size_t | PointZ (size_t idx) |
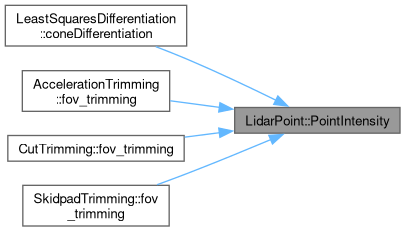
| constexpr size_t | PointIntensity (size_t idx) |
| constexpr size_t | PointRing (size_t idx) |
| constexpr size_t | PointTimestamp (size_t idx) |
Variables | |
| constexpr size_t | POINT_STEP = 26 |
| constexpr size_t | OFFSET_X = 0 |
| constexpr size_t | OFFSET_Y = 4 |
| constexpr size_t | OFFSET_Z = 8 |
| constexpr size_t | OFFSET_INTENSITY = 12 |
| constexpr size_t | OFFSET_RING = 16 |
| constexpr size_t | OFFSET_TIMESTAMP = 18 |
Detailed Description
Constants and helper functions for accessing LiDAR point cloud data.
Function Documentation
◆ PointIntensity()
|
inlineconstexpr |
◆ PointRing()
|
inlineconstexpr |

◆ PointTimestamp()
|
inlineconstexpr |
Definition at line 23 of file lidar_point.hpp.
◆ PointX()
|
inlineconstexpr |
◆ PointY()
|
inlineconstexpr |
◆ PointZ()
|
inlineconstexpr |
Variable Documentation
◆ OFFSET_INTENSITY
|
constexpr |
Definition at line 14 of file lidar_point.hpp.
◆ OFFSET_RING
|
constexpr |
Definition at line 15 of file lidar_point.hpp.
◆ OFFSET_TIMESTAMP
|
constexpr |
Definition at line 16 of file lidar_point.hpp.
◆ OFFSET_X
|
constexpr |
Definition at line 11 of file lidar_point.hpp.
◆ OFFSET_Y
|
constexpr |
Definition at line 12 of file lidar_point.hpp.
◆ OFFSET_Z
|
constexpr |
Definition at line 13 of file lidar_point.hpp.
◆ POINT_STEP
|
constexpr |
Definition at line 10 of file lidar_point.hpp.