Loading...
Searching...
No Matches
drawView.frameOrigin Class Reference
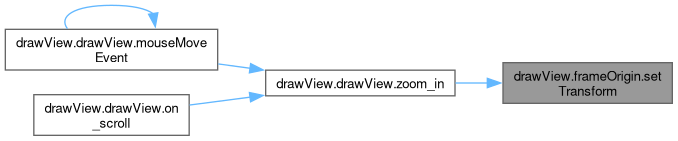
Collaboration diagram for drawView.frameOrigin:
Public Member Functions | |
| applyTransform (self) | |
| setTransform (self, translation, rotation) | |
| __init__ (self, *args, **kwargs) | |
Public Attributes | |
| lineX | |
| lineY | |
| lineZ | |
| translation | |
| rotation | |
| pointsAxisX | |
| pointsAxisY | |
| pointsAxisZ | |
Detailed Description
Definition at line 25 of file drawView.py.
Constructor & Destructor Documentation
◆ __init__()
| drawView.frameOrigin.__init__ | ( | self, | |
| * | args, | ||
| ** | kwargs | ||
| ) |
Definition at line 43 of file drawView.py.
Member Function Documentation
◆ applyTransform()
| drawView.frameOrigin.applyTransform | ( | self | ) |
Definition at line 26 of file drawView.py.
◆ setTransform()
| drawView.frameOrigin.setTransform | ( | self, | |
| translation, | |||
| rotation | |||
| ) |
Member Data Documentation
◆ lineX
| drawView.frameOrigin.lineX |
Definition at line 36 of file drawView.py.
◆ lineY
| drawView.frameOrigin.lineY |
Definition at line 37 of file drawView.py.
◆ lineZ
| drawView.frameOrigin.lineZ |
Definition at line 38 of file drawView.py.
◆ pointsAxisX
| drawView.frameOrigin.pointsAxisX |
Definition at line 44 of file drawView.py.
◆ pointsAxisY
| drawView.frameOrigin.pointsAxisY |
Definition at line 45 of file drawView.py.
◆ pointsAxisZ
| drawView.frameOrigin.pointsAxisZ |
Definition at line 46 of file drawView.py.
◆ rotation
| drawView.frameOrigin.rotation |
Definition at line 41 of file drawView.py.
◆ translation
| drawView.frameOrigin.translation |
Definition at line 40 of file drawView.py.
The documentation for this class was generated from the following file:
- src/pacsim/track_editor/drawView.py