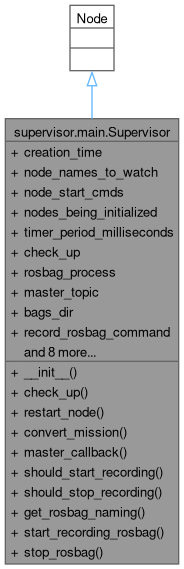
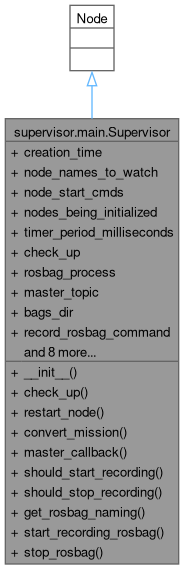
Definition at line 15 of file main.py.
◆ __init__()
| supervisor.main.Supervisor.__init__ |
( |
|
self | ) |
|
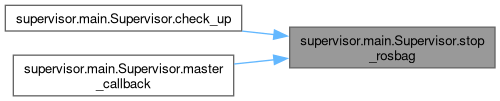
◆ check_up()
| supervisor.main.Supervisor.check_up |
( |
|
self | ) |
|
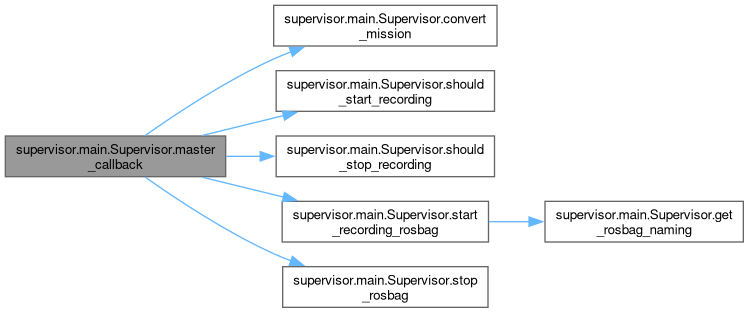
◆ convert_mission()
| supervisor.main.Supervisor.convert_mission |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ get_rosbag_naming()
| supervisor.main.Supervisor.get_rosbag_naming |
( |
|
self | ) |
|
◆ master_callback()
| supervisor.main.Supervisor.master_callback |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ restart_node()
| supervisor.main.Supervisor.restart_node |
( |
|
self, |
|
|
|
node_name |
|
) |
| |
◆ should_start_recording()
| supervisor.main.Supervisor.should_start_recording |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ should_stop_recording()
| supervisor.main.Supervisor.should_stop_recording |
( |
|
self, |
|
|
|
msg |
|
) |
| |
◆ start_recording_rosbag()
| supervisor.main.Supervisor.start_recording_rosbag |
( |
|
self | ) |
|
◆ stop_rosbag()
| supervisor.main.Supervisor.stop_rosbag |
( |
|
self | ) |
|
◆ bags_dir
| supervisor.main.Supervisor.bags_dir |
◆ check_up
| supervisor.main.Supervisor.check_up |
◆ consecutive_ts_off_count
| supervisor.main.Supervisor.consecutive_ts_off_count |
◆ consecutive_ts_on_count
| supervisor.main.Supervisor.consecutive_ts_on_count |
◆ creation_time
| supervisor.main.Supervisor.creation_time |
◆ current_rosbag_name
| supervisor.main.Supervisor.current_rosbag_name |
◆ last_received_master_msg_time
| supervisor.main.Supervisor.last_received_master_msg_time |
◆ master_callback
| supervisor.main.Supervisor.master_callback |
◆ master_topic
| supervisor.main.Supervisor.master_topic |
◆ mission
| supervisor.main.Supervisor.mission |
◆ node_names_to_watch
| supervisor.main.Supervisor.node_names_to_watch |
◆ node_start_cmds
| supervisor.main.Supervisor.node_start_cmds |
◆ nodes_being_initialized
| supervisor.main.Supervisor.nodes_being_initialized |
◆ record_rosbag_command
| supervisor.main.Supervisor.record_rosbag_command |
◆ rosbag_process
| supervisor.main.Supervisor.rosbag_process |
◆ subscription
| supervisor.main.Supervisor.subscription |
◆ temp_bag_dir
| supervisor.main.Supervisor.temp_bag_dir |
◆ timer_period_milliseconds
| supervisor.main.Supervisor.timer_period_milliseconds |
The documentation for this class was generated from the following file: