Motion model to apply to odometry sources which already output pose. More...
#include <odometry_model.hpp>
Public Member Functions | |
| Eigen::Vector3d | get_pose_difference (const Eigen::Vector3d &previous_pose, const Eigen::VectorXd &motion_data, const double delta_t) override |
| Gives the increments to the pose instead of the next pose. | |
| Eigen::Matrix3d | get_jacobian_pose (const Eigen::Vector3d &previous_pose, const Eigen::VectorXd &motion_data, const double delta_t) override |
| Get the Jacobian matrix of the motion model in relation to motion_data (commands) | |
| Eigen::MatrixXd | get_jacobian_motion_data (const Eigen::Vector3d &previous_pose, const Eigen::VectorXd &motion_data, const double delta_t) override |
| Get the Jacobian matrix of the motion model in relation to motion data (commands) | |
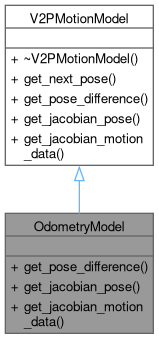
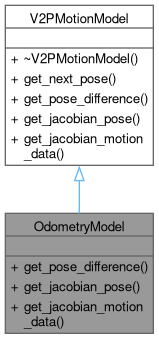
 Public Member Functions inherited from V2PMotionModel Public Member Functions inherited from V2PMotionModel | |
| virtual | ~V2PMotionModel ()=default |
| virtual Eigen::Vector3d | get_next_pose (const Eigen::Vector3d &previous_pose, const Eigen::VectorXd &motion_data, const double delta_t) |
| Predict the pose of the robot given the motion data. | |
Detailed Description
Motion model to apply to odometry sources which already output pose.
This model is used so that odometry sources also have a motion model and code remains the same for every solution
Definition at line 15 of file odometry_model.hpp.
Member Function Documentation
◆ get_jacobian_motion_data()
|
overridevirtual |
Get the Jacobian matrix of the motion model in relation to motion data (commands)
This is used to multiplty by the motion data noise to get the matrix to be summed to the covariance
- Parameters
-
previous_pose motion_data (Deltax, Deltay, Delta_theta) delta_t
- Returns
- Eigen::Matrix3d
Implements V2PMotionModel.
Definition at line 23 of file odometry_model.cpp.
◆ get_jacobian_pose()
|
overridevirtual |
Get the Jacobian matrix of the motion model in relation to motion_data (commands)
- Parameters
-
previous_pose motion_data (Deltax, Deltay, Delta_theta) delta_t
- Returns
- Eigen::Matrix3d
Implements V2PMotionModel.
Definition at line 16 of file odometry_model.cpp.
◆ get_pose_difference()
|
overridevirtual |
Gives the increments to the pose instead of the next pose.
- Parameters
-
previous_pose motion_data (Deltax, Deltay, Delta_theta) delta_t
- Returns
- Eigen::Vector3d
Implements V2PMotionModel.
Definition at line 6 of file odometry_model.cpp.

The documentation for this class was generated from the following files:
- src/motion_lib/include/motion_lib/v2p_models/odometry_model.hpp
- src/motion_lib/src/v2p_models/odometry_model.cpp