Loading...
Searching...
No Matches
NodeControllerTrait Class Referenceabstract
Trait class for node control in SLAM solvers. More...
#include <node_controller_trait.hpp>
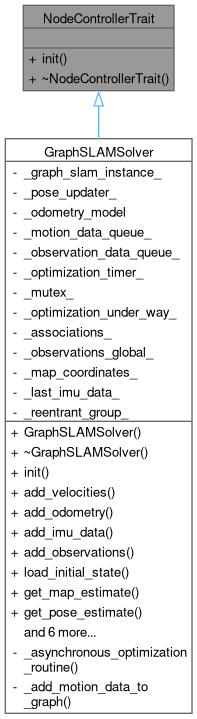
Inheritance diagram for NodeControllerTrait:
Collaboration diagram for NodeControllerTrait:
Public Member Functions | |
| virtual void | init (std::weak_ptr< rclcpp::Node > node)=0 |
| Initialize the SLAM solver. | |
| virtual | ~NodeControllerTrait ()=default |
Detailed Description
Trait class for node control in SLAM solvers.
This trait provides an interface for SLAM solvers to interact with ROS2 nodes, allowing them to initialize and manage node-related functionalities.
Definition at line 11 of file node_controller_trait.hpp.
Constructor & Destructor Documentation
◆ ~NodeControllerTrait()
|
virtualdefault |
Member Function Documentation
◆ init()
|
pure virtual |
Initialize the SLAM solver.
This method is used to initialize the SLAM solver's aspects that require the node e.g. timer callbacks
- Parameters
-
node ROS2 node
Implemented in GraphSLAMSolver.
The documentation for this class was generated from the following file:
- src/slam/include/slam_solver/solver_traits/node_controller_trait.hpp